Lyles College of Engineering
2025 Projects Day
Fresno State’s Lyles College of Engineering will host its 18th annual Projects Day from 2 to 6 p.m. Wednesday, April 30, at the Satellite Student Union. The projects showcased are a culmination of at least one year of research and design activities in the disciplines of civil, computer, electrical, geomatics, and mechanical engineering as well as architectural studies and construction management. Student projects are supported by Lyles College faculty advisors, staff and industry liaisons and are funded by internal and external grants, companies and students. Thank you to the numerous industry professionals for their generous gift of time and mentorship.
Lyles College Of Engineering Projects
A Collaborative, Sustainable Approach to County of Kings' New Government Complex Heart
of the Valley Constructors
Students: Aidee Alvarado, Guadalupe Casas, Cristofer Garcia Machorro, Jose Herrera, Anne Remlinger,
Jose Rivera, David Solis Reyes, Airi Villa
Mentors/Advisors: Dr. Vivien Luo, Loren Aiton
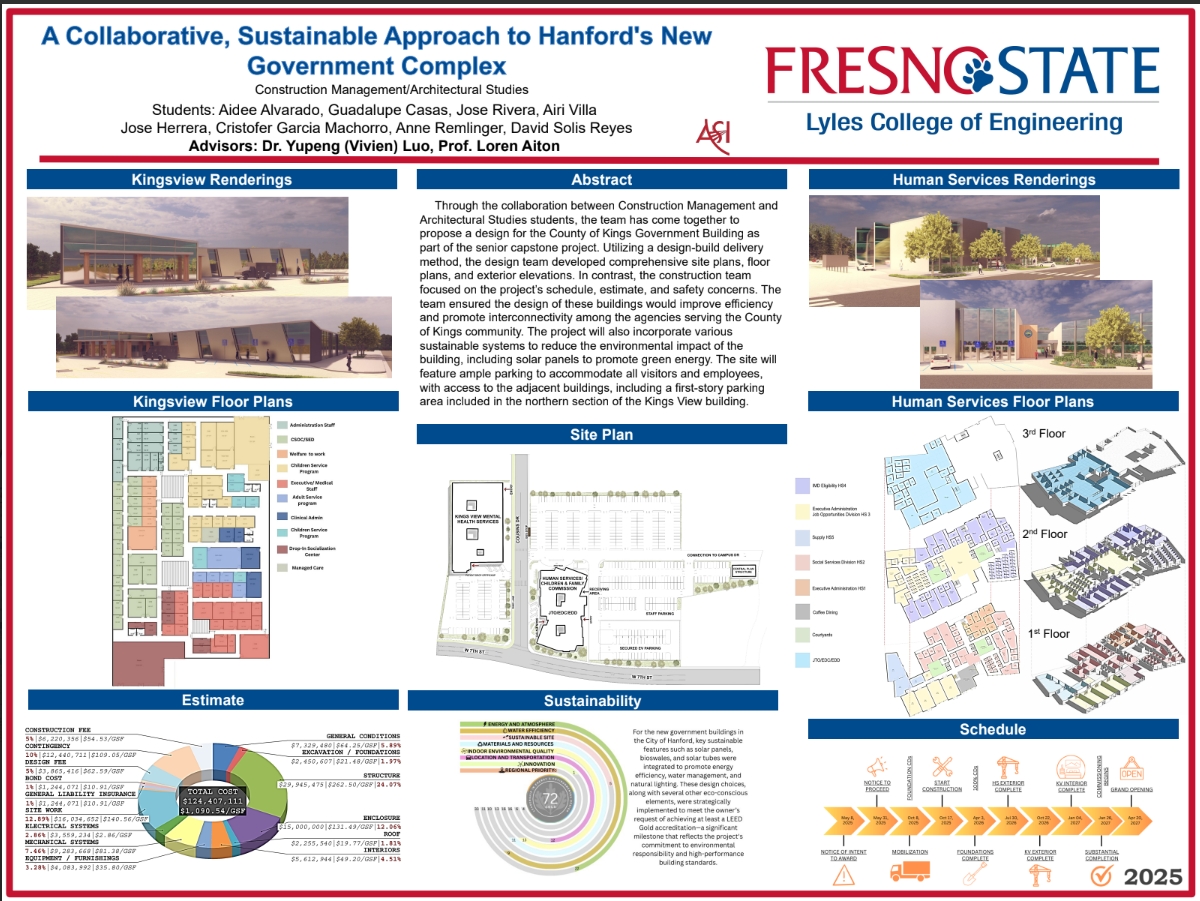
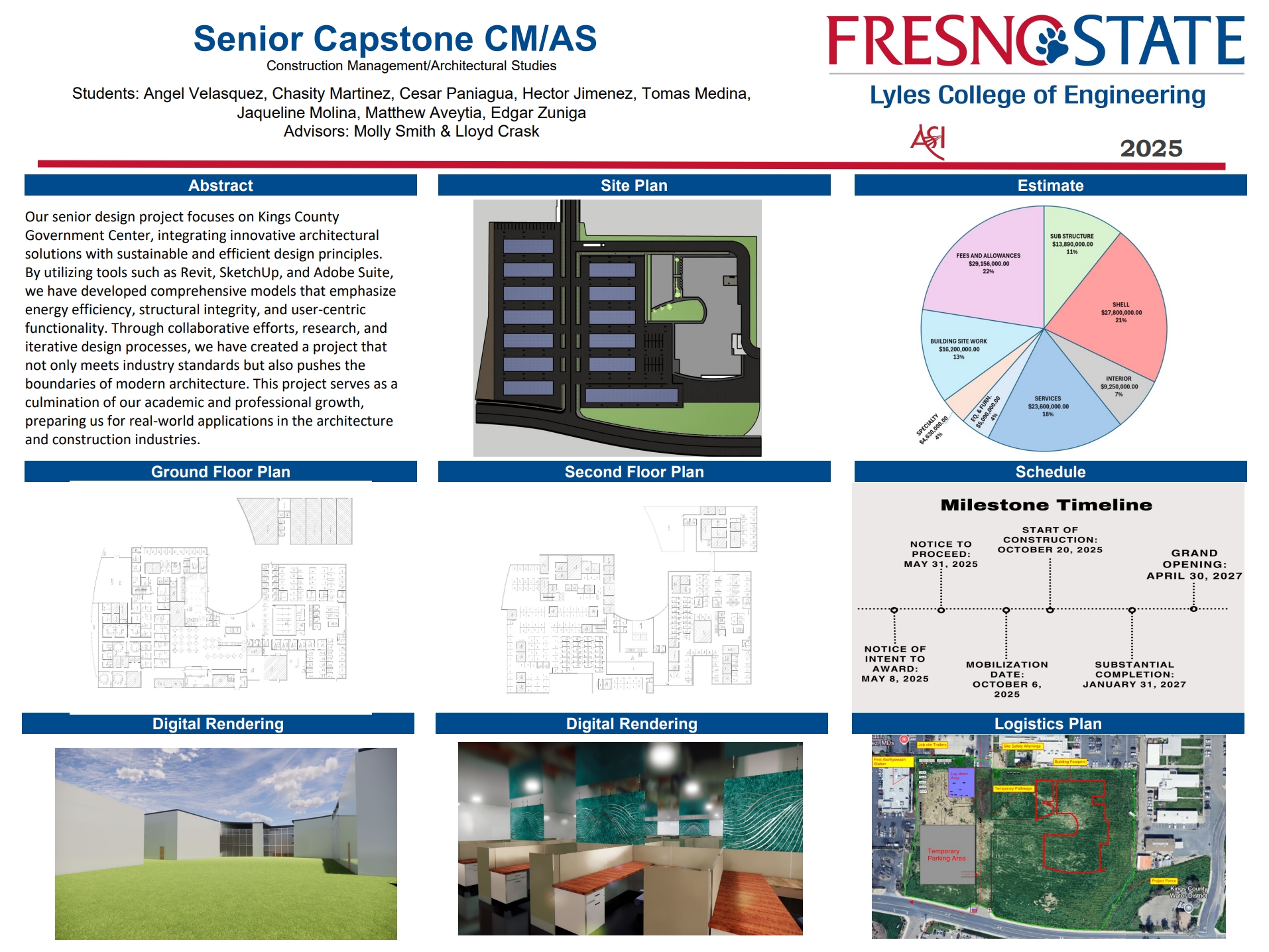
Summary: Through the collaboration between Construction Management and Architectural Studies
students, the team has come together to propose a design for the County of Kings Government
Building as part of the senior capstone project. Utilizing a design-build delivery
method, the design team developed comprehensive site plans, floor plans, and exterior
elevations, while the construction team focused on the project’s schedule, estimate,
and safety concerns. The team ensured the design of these three buildings would improve
efficiency and promote interconnectivity among the agencies serving the County of
Kings community. The project will also incorporate various sustainable systems to
reduce the environmental impact of the building, including solar panels to promote
green energy. The site will feature ample parking to accommodate all visitors and
employees, with access to the adjacent buildings, including a first-story parking
area included in the northern section of the Kings View building.
{kind=link}
Cost-Benefit Analysis and Return on Investment (ROI) of AR/VR-BIM Integration in Construction
Students: Pranay Pantangi
Mentors/Advisors: Dr. Tolulope Sanni
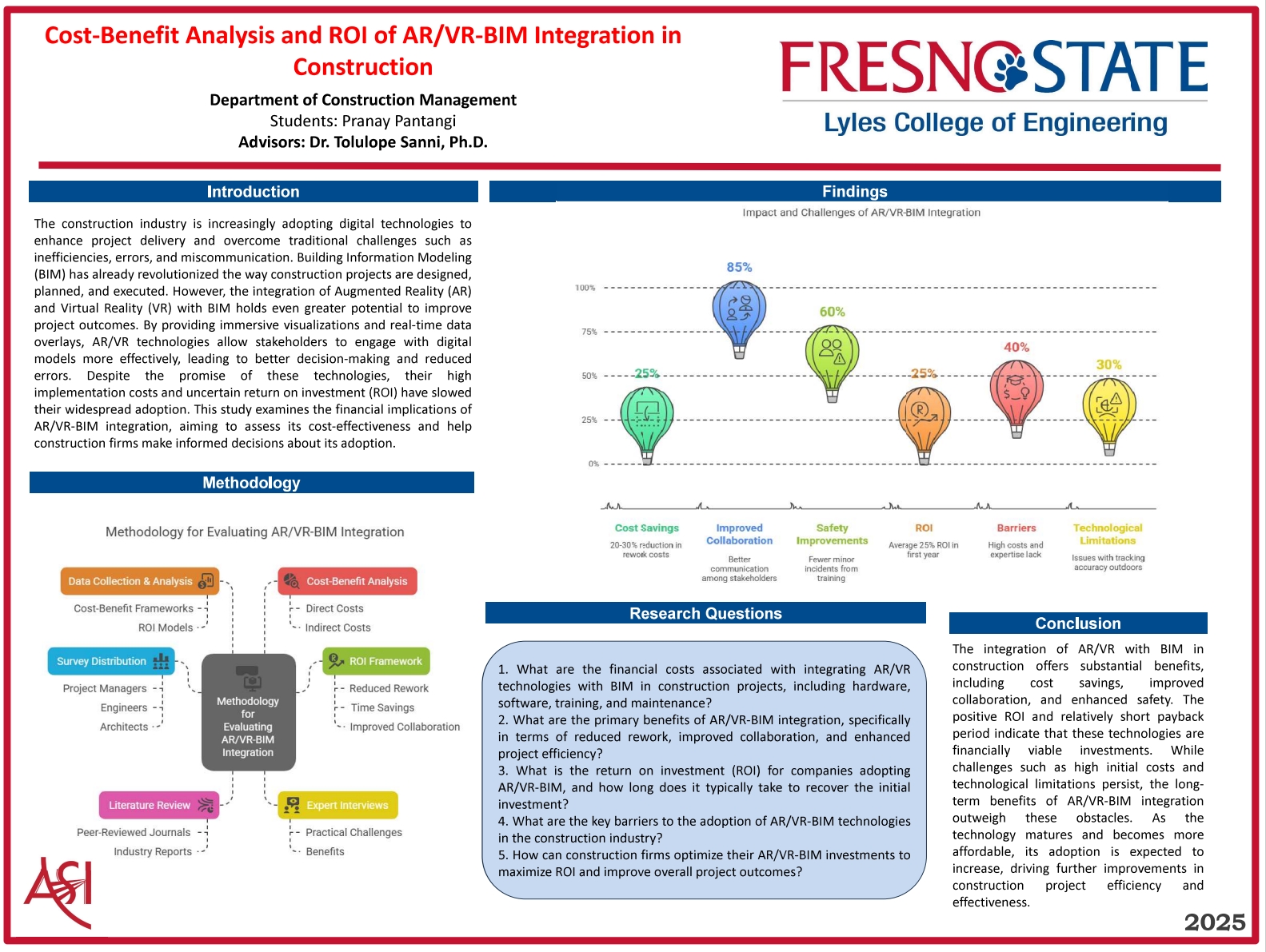
Summary: The construction industry is undergoing a technological transformation with the integration
of Augmented Reality (AR), Virtual Reality (VR), and Building Information Modeling
(BIM). While individually, these technologies offer significant benefits; their combined
use can revolutionize project delivery by enhancing design visualization, improving
stakeholder collaboration, and reducing errors. However, the financial viability of
integrating AR/VR with BIM, specifically regarding cost-effectiveness and Return on
Investment (ROI), remains inadequately explored. This research aims to bridge this
gap by evaluating the financial impact of AR/VR-BIM integration through a comprehensive
cost-benefit analysis and ROI assessment. The study will explore financial benefits
such as error reduction, minimized rework, time savings, and improved collaboration
while also examining associated costs, including hardware, software, and training.
The research will utilize quantitative data from real-world case studies and expert
interviews to develop a standardized ROI framework tailored to the construction industry.
The outcome will offer construction firms a data-driven methodology to evaluate the
financial feasibility of adopting AR/VR-BIM technologies, facilitating informed decision-making
for enhanced project efficiency and profitability.
{kind=link}
County of Kings: City of Hanford New Government Office Building
Students: Gabino Barranco, Gerardo Fabela, Luis Belmonte, Aidan Shanahan, Adam Xiong,
Bryan Romo, Oswaldo Ramirez, Andre Vaccaro
Mentors/Advisors: Molly Smith, Lloyd Crask
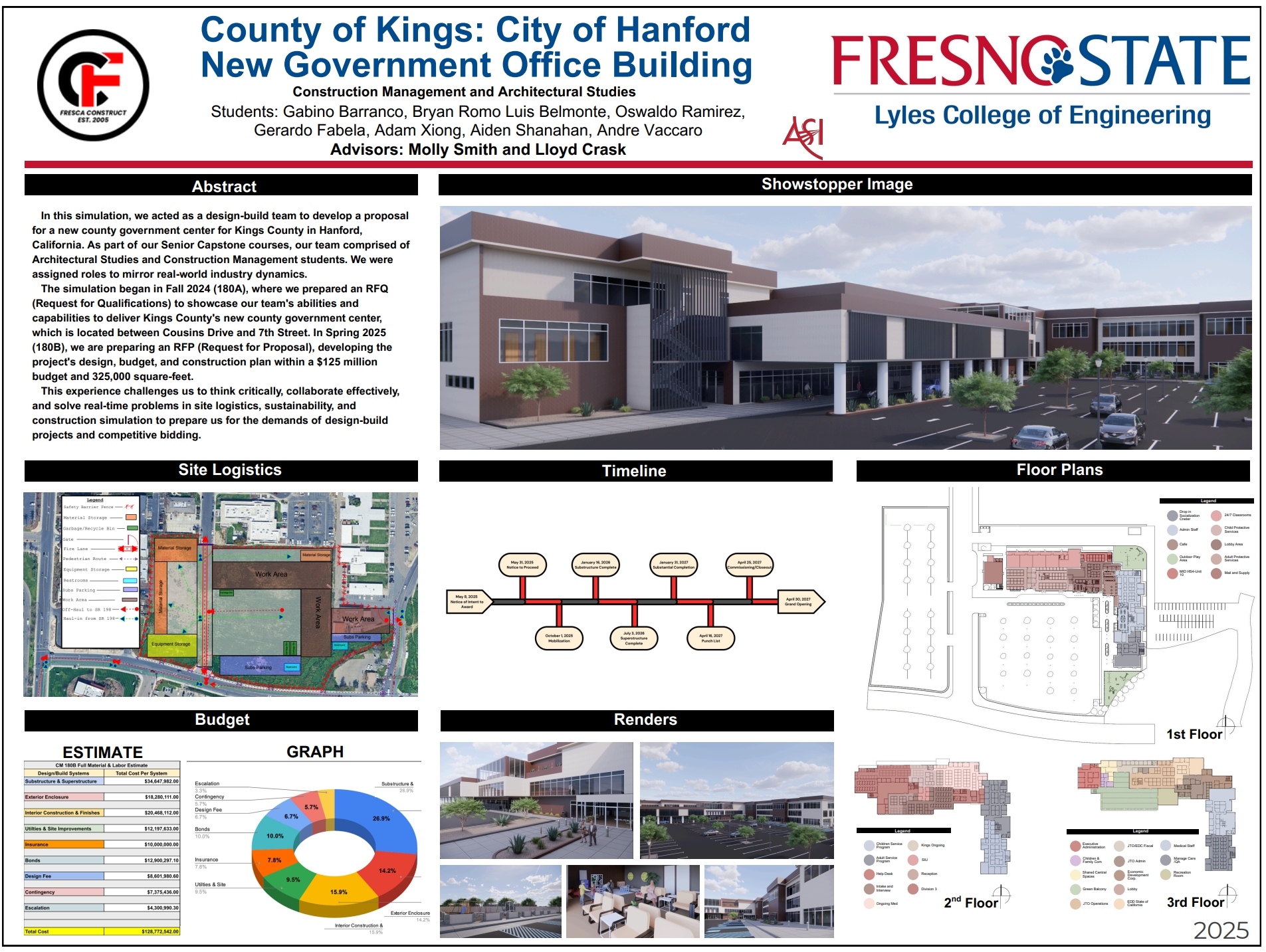
Summary: In this simulation, we acted as a design-build team to develop a proposal
for a new county government center for Kings County in Hanford, California. As part
of our Senior Capstone courses, our team comprised of Architectural Studies and Construction
Management students. We were assigned roles to mirror real-world industry dynamics.The
simulation began in Fall 2024 (180A), where we prepared an RFQ (Request for Qualifications)
to showcase our team's abilities and capabilities to deliver Kings County's new county
government center, which is located between Cousins Drive and 7th Street. In Spring
2025 (180B), we are preparing an RFP (Request for Proposal), developing the project's
design, budget, and construction plan within a $125 million budget and 325,000 square-feet.
This experience challenges us to think critically, collaborate effectively, and solve
real-time problems in site logistics, sustainability, and construction simulation
to prepare us for the demands of design-build projects and competitive bidding.
{kind=link}
County of Kings Government Center
Students: Roberto Garcia, Ryan Stoebig, Everardo Alcantar, Ray Stinnett, Jay Mann, Mariana
Vidales, Destiny Tamele, Ever Loya, Tyler Lewellen
Mentors/Advisors: Lloyd Crask, Molly Smith
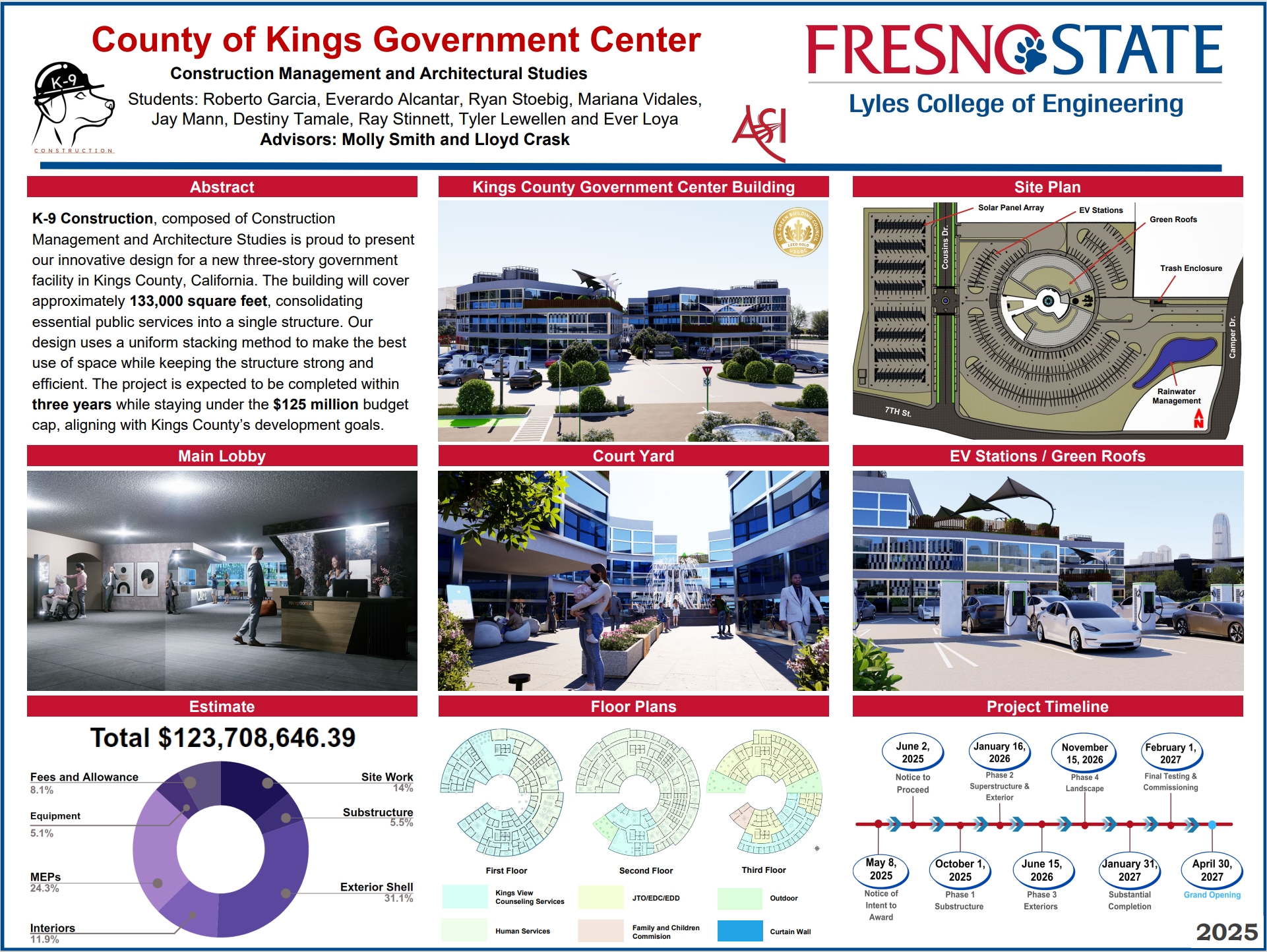
Summary: K-9 Construction, composed of Construction Management and Architecture students is
proud to present our innovative design for a new three-story government facility in
Kings County, California. The building will cover approximately 133,000 square, consolidating
essential public services into a single structure. Our design uses a uniform stacking
method to make the best use of space while keeping the structure strong and efficient.
Through a design-build approach, we will work closely together across different fields
to keep the project organized and on track. The project is expected to be completed
within three years while staying under the $125 million budget cap, aligning with
Kings County’s development goals. By using modern construction methods and sustainable
practices, we are creating a long-lasting building that will serve the community for
years to come. Our goal is to design a space that supports public needs while improving
the way government services work together.
{kind=link}
Design-Build Approach for the County of Kings Government Center
Students: Adam Romero, Urian Guerrero-Maldonado, Rafael Mendoza Jr, Juliette Castillo, Rene
Garcia-Rios, Sofia Arellano, Manuel Santoyo-Puente, Manar Mislih, Connor Fritsch
Mentors/Advisors: Loren Aiton, Dr. Vivien Luo
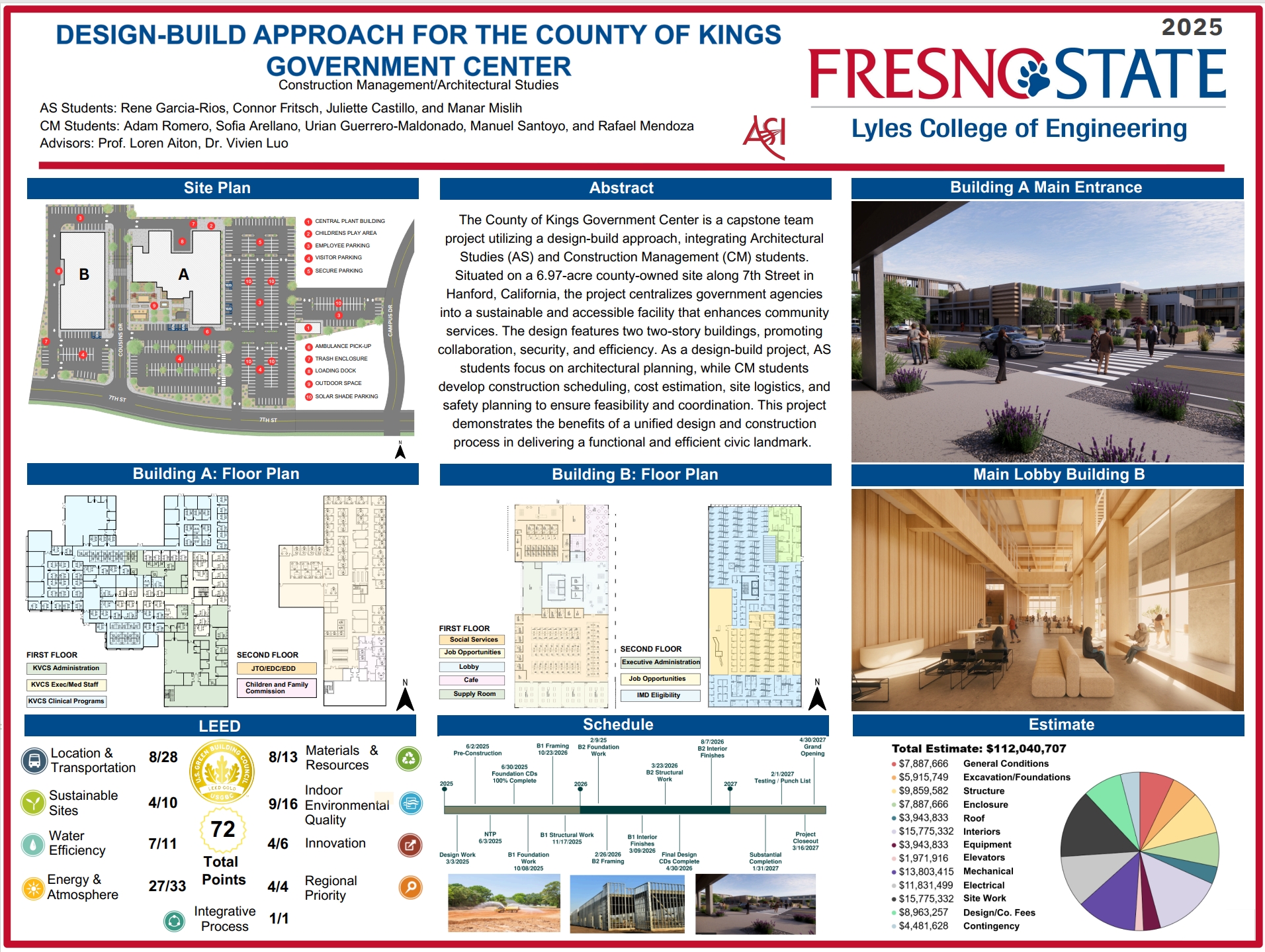
Summary: The County of Kings Government Center is a capstone team project utilizing a design-build
approach, integrating Architectural Studies (AS) and Construction Management (CM)
students. Situated on a 6.97-acre county-owned site along 7th Street in Hanford, California,
the project centralizes government agencies into a sustainable and accessible facility
that enhances community services. The design features two two-story buildings, promoting
collaboration, security, and efficiency. As a design-build project, AS students focus
on architectural planning, while CM students develop construction scheduling, cost
estimation, site logistics, and safety planning to ensure feasibility and coordination.
This project demonstrates the benefits of a unified design and construction process
in delivering a functional and efficient civic landmark.
{kind=link}
Design-Build Government Center Office Building
Students: Dario Izazaga, Chris Rodriguez, Gina Franco, Maria Estrada, Lesly Lopez, Julio Lopez,
Lily Alvarez, Eleazar Maldonado, Kevin Sandoval
Mentors/Advisors: Lloyd Crask, Molly Smith
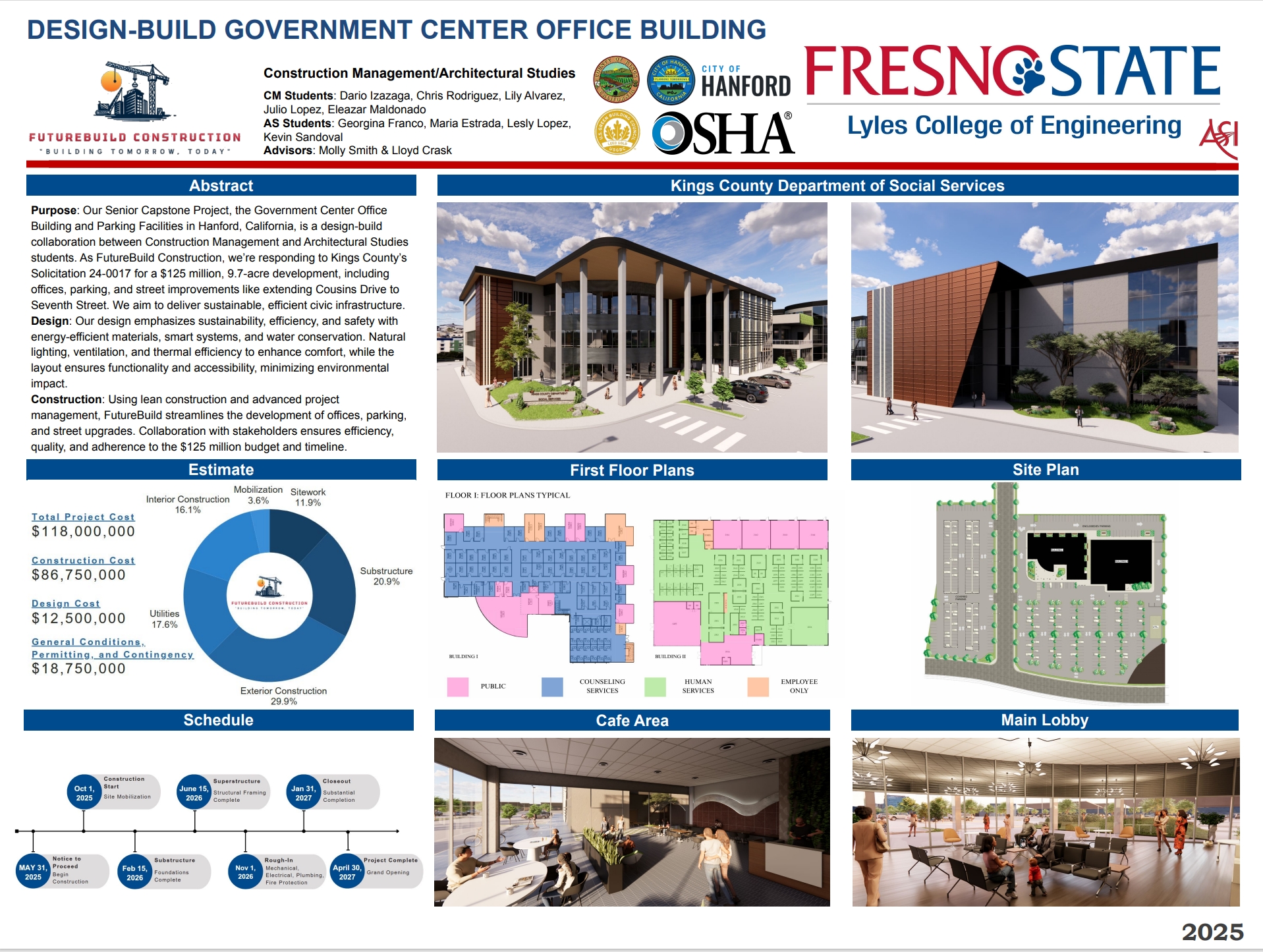
Summary: Our Senior Capstone Class Project, the Government Center Office Building and Parking
Facilities in Hanford, California, is an immersive design-build experience where senior
Construction Management (CM) and Architectural Studies (AS) students collaborate on
a comprehensive proposal. FutureBuild Construction is responding to Solicitation Number
24-0017 from Kings County, California, for the $125 million development of a 9.7-acre
site, including new government office buildings, parking facilities, and street improvements
such as the extension of Cousins Drive to Seventh Street with upgraded utilities.
Our design integrates sustainability, efficiency, and safety, incorporating energy-efficient
materials, smart building systems, and water conservation strategies to minimize environmental
impact. Natural lighting, ventilation, and thermal efficiency enhance user comfort,
while lean construction principles and advanced project management tools ensure streamlined
execution. Through innovation and stakeholder collaboration, FutureBuild Construction
aims to set a new standard for sustainable civic infrastructure that serves the community
efficiently.
{kind=link}
Enhancing Social Sustainability in Small Construction Companies in California: Overcoming
Awareness Gaps, Cultural Resistance and Community Engagement.
Students: Anurag Wani
Mentors/Advisors: Dr. Vivien Luo
Sponsors: LCOE Research Stipend
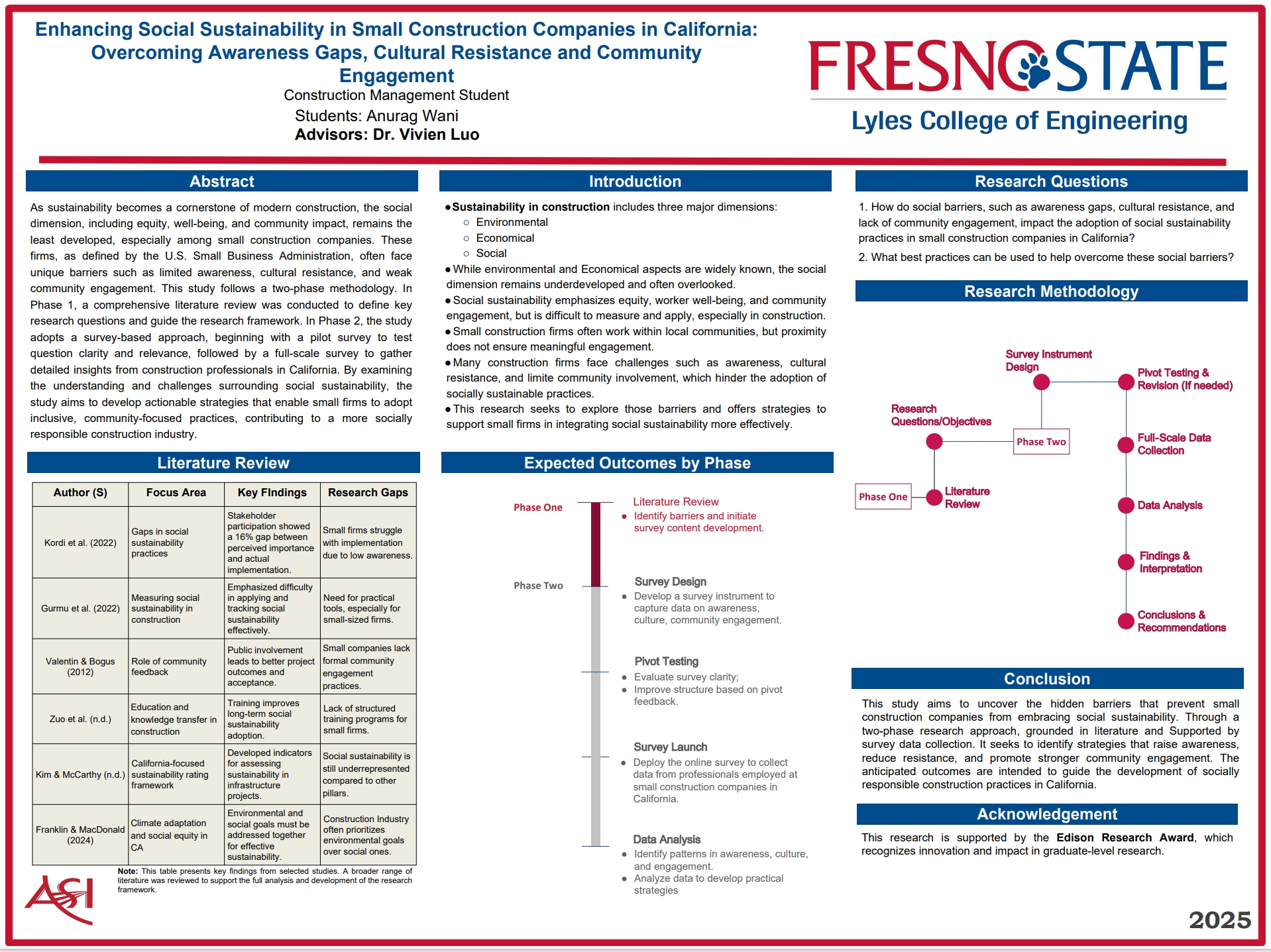
Summary: The construction industry has increasingly recognized the importance of sustainability
in driving long-term environmental, economic, and social benefits. Small construction
companies, however, often face unique challenges in adopting sustainable practices,
particularly in terms of awareness and social constraints. This research investigates
the barriers to social sustainability adoption in small construction companies within
California, focusing on factors such as community engagement, cultural resistance,
and lack of awareness. Small construction firms are defined by their revenue and total
number of employees, as outlined by the U.S. Small Business Administration. The study
employs a survey-based methodology to gather insights from these firms, exploring
their understanding of social sustainability and identifying key challenges. The findings
aim to provide actionable recommendations to improve awareness and facilitate the
adoption of sustainable practices, ultimately contributing to a more socially responsible
construction sector.
{kind=link}
New Government Center for Kings County
Students: Guadalupe Cervantes, Julio Cesar Corona, Vanessa Rodriguez, Alejandro Rodriguez,
Aldair Robles, Brandon Padilla, Gustavo Garcia, Francine Velasco
Mentors/Advisors: Loren Aiton, Dr. Vivien Luo
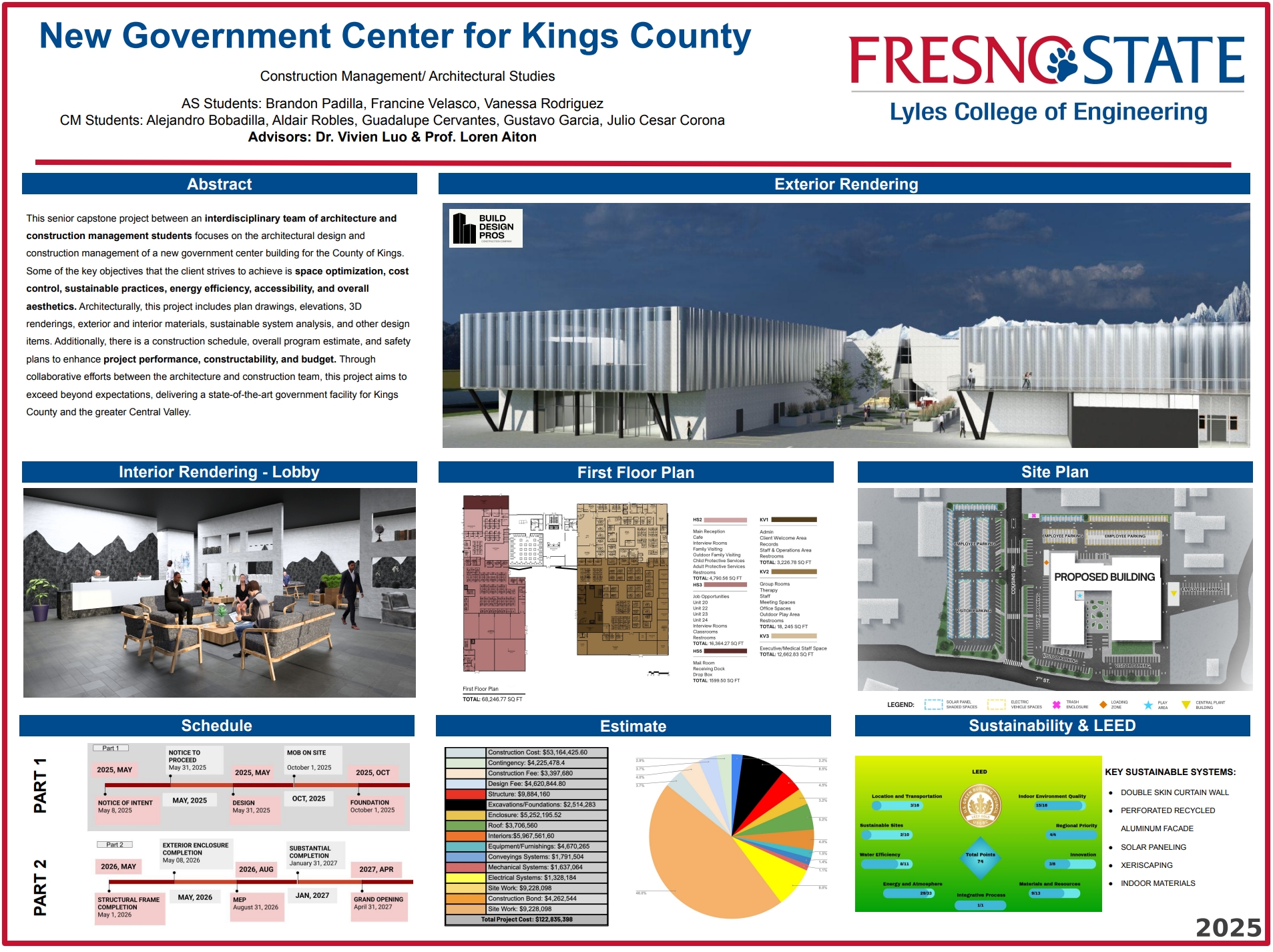
Summary: This senior capstone project between an interdisciplinary team of architecture and
construction management students focuses on the architectural design and construction
management of a new government center building for the County of Kings. Some of the
key objectives that the client strives to achieve is space optimization, cost control,
sustainable practices, energy efficiency, accessibility, and overall aesthetics. Architecturally,
this project includes plan drawings, elevations, 3D renderings, exterior and interior
materials, sustainable system analysis, and other design items. Additionally, there
is a construction schedule, overall program estimate, and safety plans to enhance
project performance, constructability, and budget. Through collaborative efforts between
the architecture and construction team, this project aims to exceed beyond expectations,
delivering a state-of-the-art government facility for Kings County and the greater
Central Valley.
{kind=link}
Senior Capstone CM/AS
Students: Angel Velasquez, Chasity Martinez, Hector Jimenez, Jacky Molina, Matthew Aveytia,
Edgar Zuniga, Tomas Medina, Cesar Paniagua
Mentors/Advisors: Molly Smith, Michele Randel
Summary: Modern construction faces growing challenges in sustainability and efficiency. Team
#3, Creative Constructors, addresses these issues through an innovative design-build
project that integrates eco-friendly practices with real-world construction methods.
The project’s objective is to develop a cost-effective, energy-efficient building
that combines architectural creativity and practical execution. Our interdisciplinary
team used digital modeling, energy simulations, and cost analysis to optimize design
and construction workflows while incorporating advanced materials and prefabrication
techniques. Preliminary findings reveal significant improvements in energy performance
and waste reduction, confirming the benefits of our integrated approach. This project
highlights the importance of collaboration across disciplines and provides a replicable
framework for future sustainable building initiatives.
{kind=link}
Sustainability in the Age of Innovation: Negative Impacts of Jobsite Construction
Technologies
Students: Niveditha Kuppula
Mentors/Advisors: Dr. Sagata Bhatwani
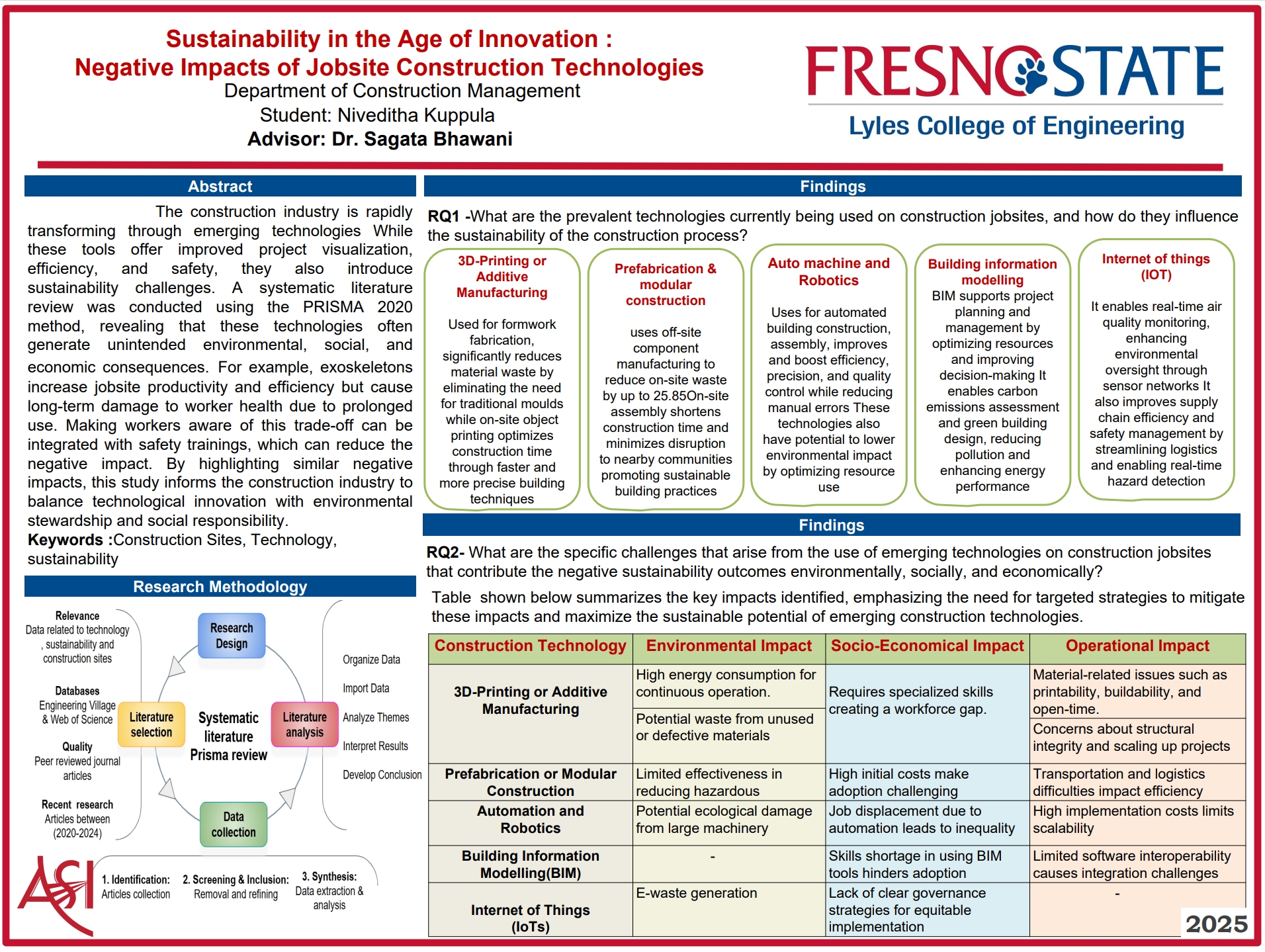
Summary: This study employs a systematic literature review using the PRISMA methodology to
explore the negative sustainability impacts of emerging construction technologies.
It is guided by two key research questions: (1) What are the prevalent technologies
currently being implemented on construction jobsites, and how do they influence the
sustainability of the construction process? (2) What specific challenges arise from
the use of emerging technologies on construction jobsites that contribute to negative
sustainability outcomes environmentally, socially, and economically? A comprehensive
search of peer-reviewed journal articles was conducted using Engineering Village and
Web of Science, applying keyword combinations such as “construction site,” “technology,”
and “sustainability.” Thematic analysis of the selected literature reveals that while
these technologies improve operational efficiency, they also lead to environmental
degradation through increased energy consumption, resource depletion, and electronic
waste generation. Furthermore, automation and robotics contribute to labor displacement,
exacerbating socioeconomic inequalities and workforce instability. The findings emphasize
the need for a balanced approach to technology adoption that aligns innovation with
sustainability principles. By identifying the negative environmental and socioeconomic
impacts associated with emerging construction technologies, this study highlights
the importance of integrating sustainable practices to mitigate adverse effects while
ensuring long-term environmental integrity and social equity in the construction industry.
{kind=link}
Tall Wood Buildings – A Comprehensive Analysis of Case Studies and Regulations
Students: Kiran Kumar, Reddy Induro
Mentors/Advisors: Loren Aiton
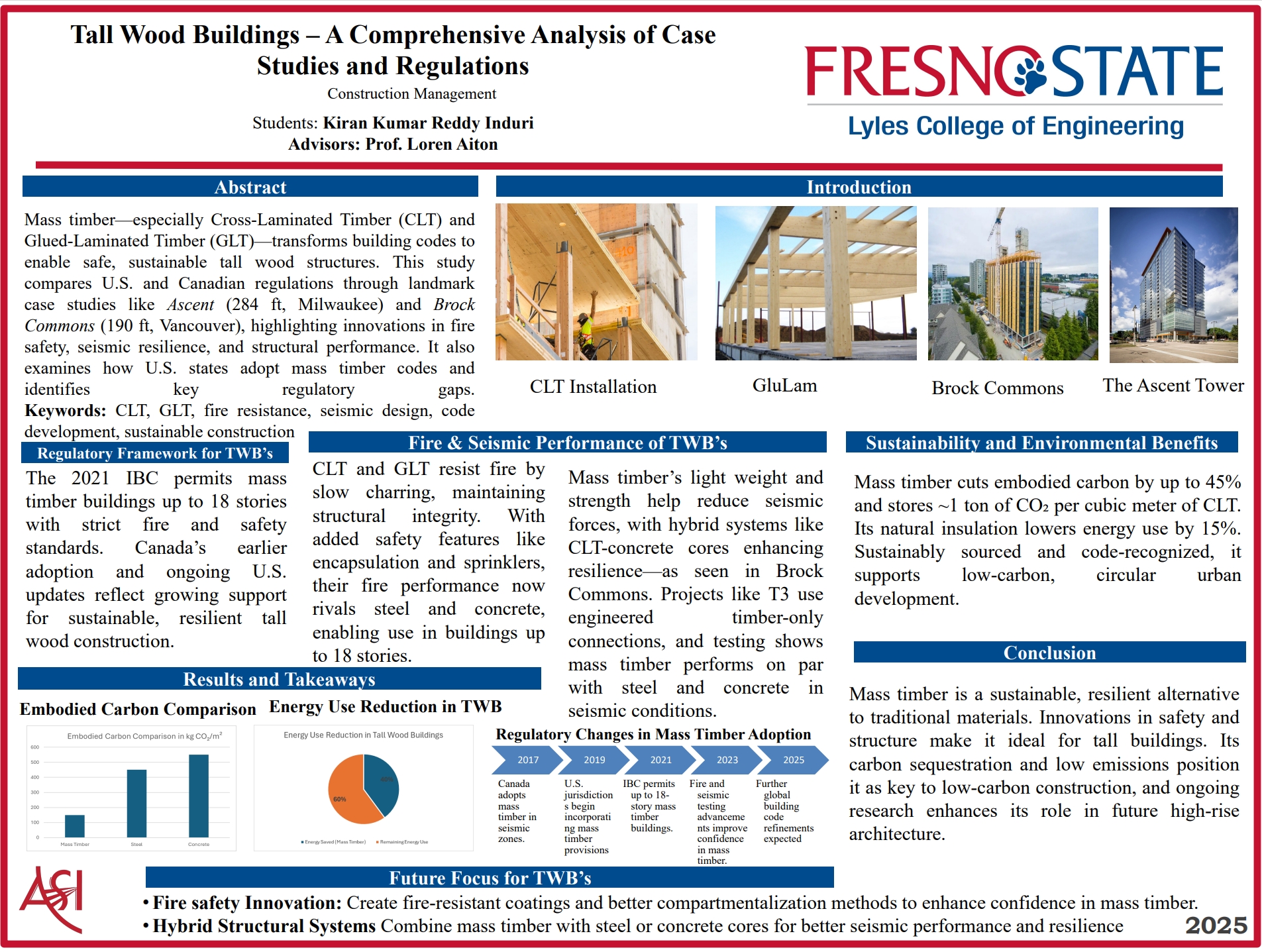
Summary: The introduction of mass timber for tall wood buildings, especially Cross Laminated
Timber (CLT) and Glued Laminated Timber (GLT), has prompted a revolution in the building
codes to ensure more safety for the structures. This research aims to compare tall
wood building regulations in the USA and analyze existing case studies for wood buildings
compared to those for other materials. The existing successful tall wood buildings,
Like Ascent (284 ft, 25 stories) in Milwaukee, USA, and Brock Commons Tall Wood House
(190 ft, 18 stories) in Canada, demonstrate how innovative techniques have been utilized
to meet the regulatory requirements. These innovative techniques, such as advanced
fire protection systems and seismic performance measures, have played a crucial role
in the success of these buildings. This research also examines how some states adapted
their regulations for the building codes to build using mass timber with some specifications
in mind, such as fire protection, seismic performance, and load-bearing capacities.
In conclusion, A comparative understanding of how these building codes shape the mass
timber usage in tall buildings in the USA, the places where they should be overcome,
and their potential to hold for revolution in sustainable construction.
{kind=link}
A Real-Life-Data-Based Temporal Analysis of Transit Accessibility in Fresno City
Students: Pratham Aggarwal, Kent Klann, Amneek Chalotra, Ritvik Gaur, Saugat Pauda
Mentors/Advisors: Dr. Aly Tawfik
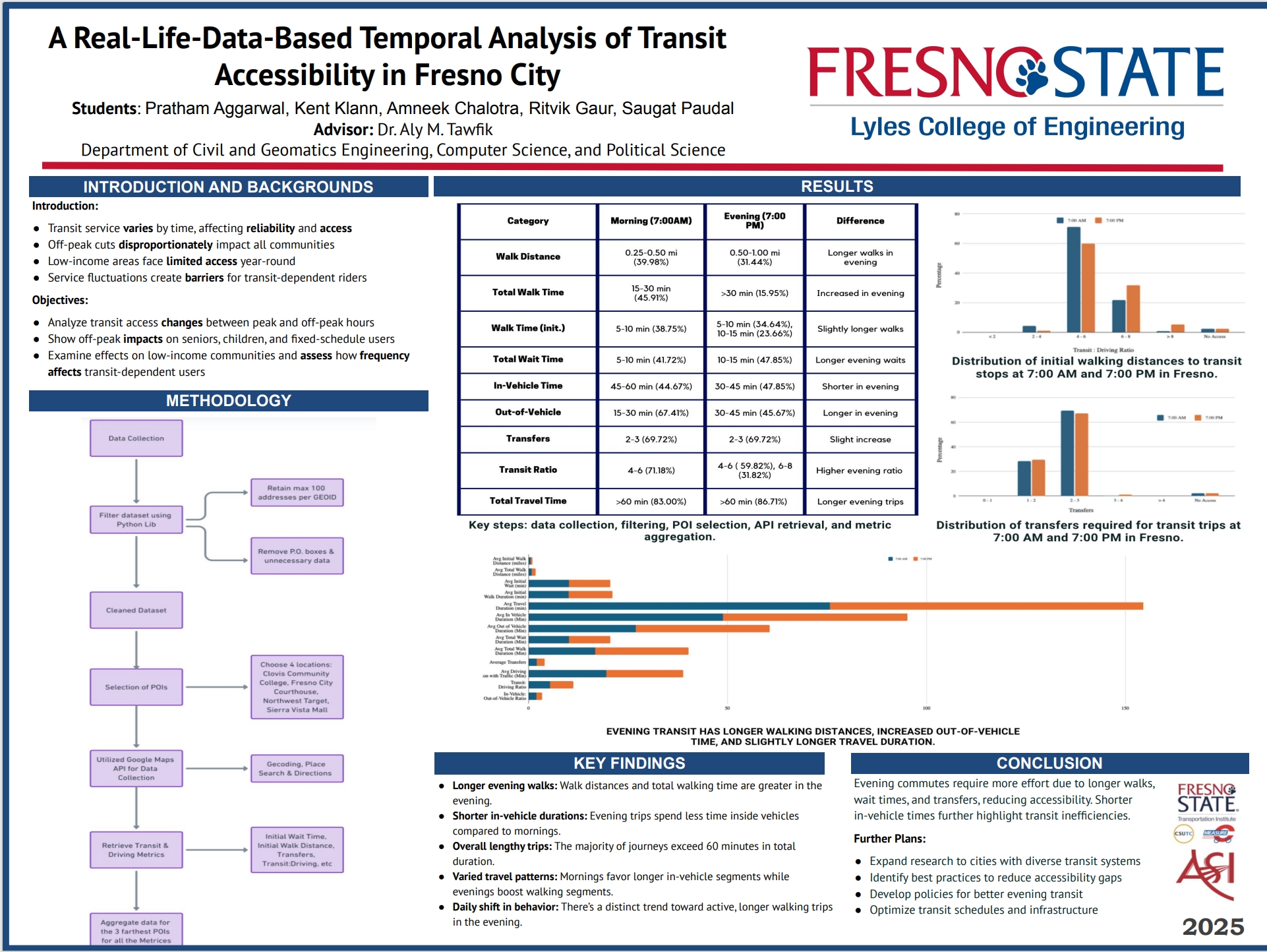
Summary: Public transportation is essential for connecting people to services, but accessibility
often varies throughout the day, creating barriers for users. This study examines
temporal variations in transit accessibility in Fresno City, California (as a case
study), focusing on differences between peak and off-peak hours. Using data from 338
census block groups, we analyzed metrics such as transit access rates, travel times,
walking distances, and transit-to-driving travel time ratios. Data was collected and
processed using APIs and Python libraries. The analysis highlights significant accessibility
fluctuations during off-peak hours, affecting transit reliability and convenience.
These findings provide planners and policymakers with actionable insights to address
temporal disparities, helping design a more consistent and equitable transit system
that meets community needs.
{kind=link}
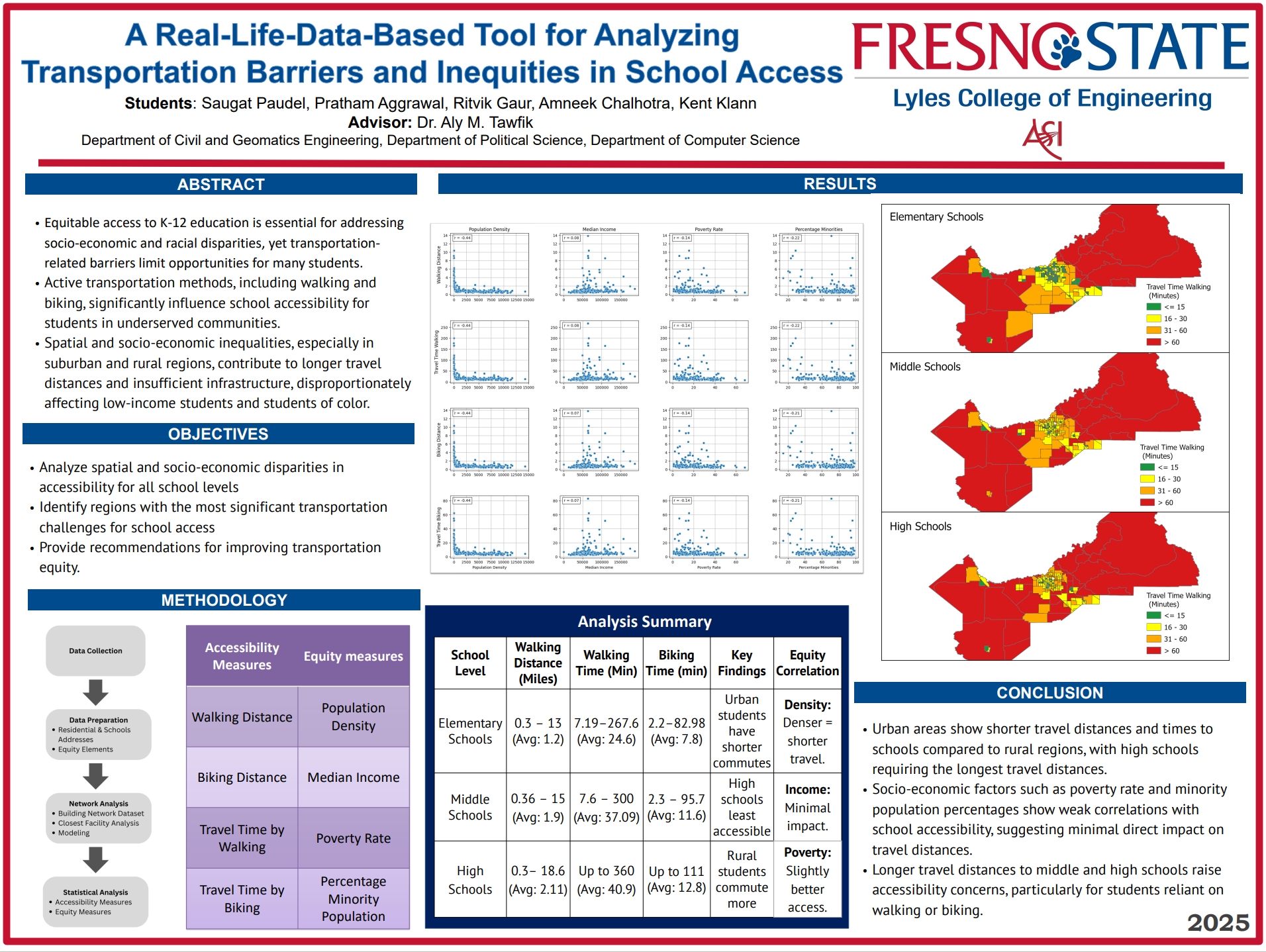
A Real-Life-Data-Based Tool for Analyzing Transportation Barriers and Inequities in
School Access
Students: Saugat Paudel, Pratham Aggrawal, Ritvik Gaur, Amneek Chalhotra, Kent Klann
Mentors/Advisors: Dr. Aly Tawfik
Summary: Ensuring equitable access to K-12 schools is essential for fostering educational
development. This study analyzes disparities in school accessibility across the Fresno
County, where socio-economic and spatial barriers impact students who rely on walking
and biking. Using randomized residential addresses from each census tract and socio-economic
data, school locations are mapped, and travel distances are calculated with ArcGIS
Network Analyst. Results indicate that population density is a major factor influencing
school access, while income, poverty rates, and minority status show minor disparities.
These findings offer critical insights for urban planners and policymakers to develop
strategies that enhance equitable school access, ensuring that all students, regardless
of socio-economic background, have fair opportunities for academic success. By identifying
communities facing greater challenges, this study supports targeted interventions
to improve infrastructure and accessibility, ultimately fostering more inclusive educational
opportunities and reducing barriers for underserved populations.
{kind=link}
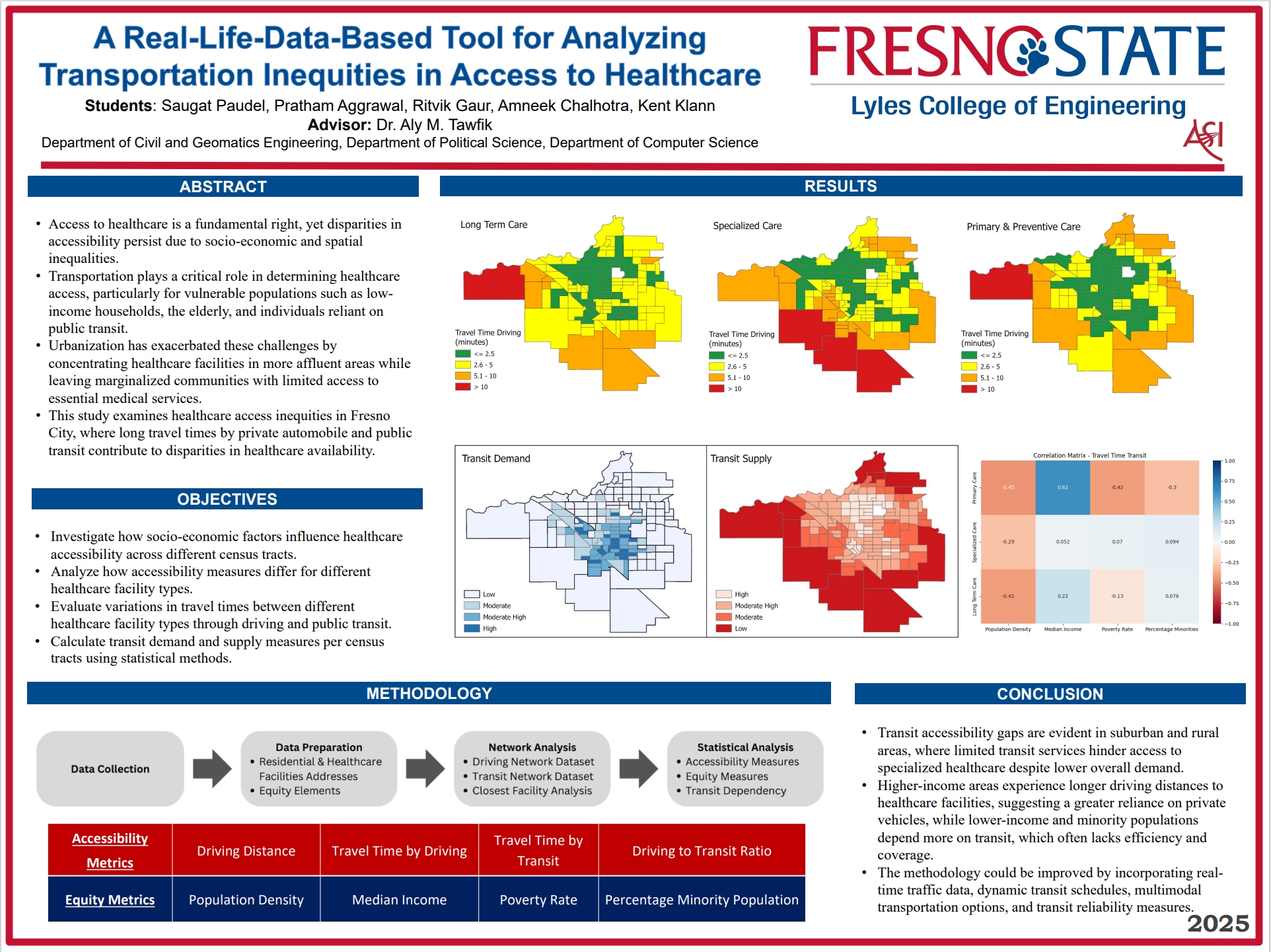
A Real-Life-Data-Based Tool for Analyzing Transportation Inequities in Access to Healthcare
Students: Saugat Paudel, Pratham Aggrawal, Ritvik Gaur, Amneek Chalhotra, Kent Klann
Mentors/Advisors: Dr. Aly Tawfik
Sponsors: Fresno State Transportation Institute; Measure C; CSUTC
Summary: Equitable access to healthcare facilities is crucial for promoting positive health
outcomes. This study examines disparities in healthcare accessibility across Fresno
City, where long transit and driving distances to hospitals and clinics contribute
to health inequities. Using randomized residential addresses from census tracts, socio-economic
data, and geospatial analysis with the ArcGIS Network Analyst tool, the research calculates
travel time disparities for different socio-economic groups. Findings reveal that
low-income and minority communities often face greater challenges in accessing healthcare
services. By identifying areas with the most pronounced inequities, the study provides
critical insights for transportation engineers, policymakers, and urban planners to
develop strategies that enhance healthcare accessibility. Addressing these disparities
can help ensure that all individuals, regardless of socio-economic status, have reliable
access to essential medical services, ultimately fostering a more equitable and inclusive
healthcare system.
{kind=link}
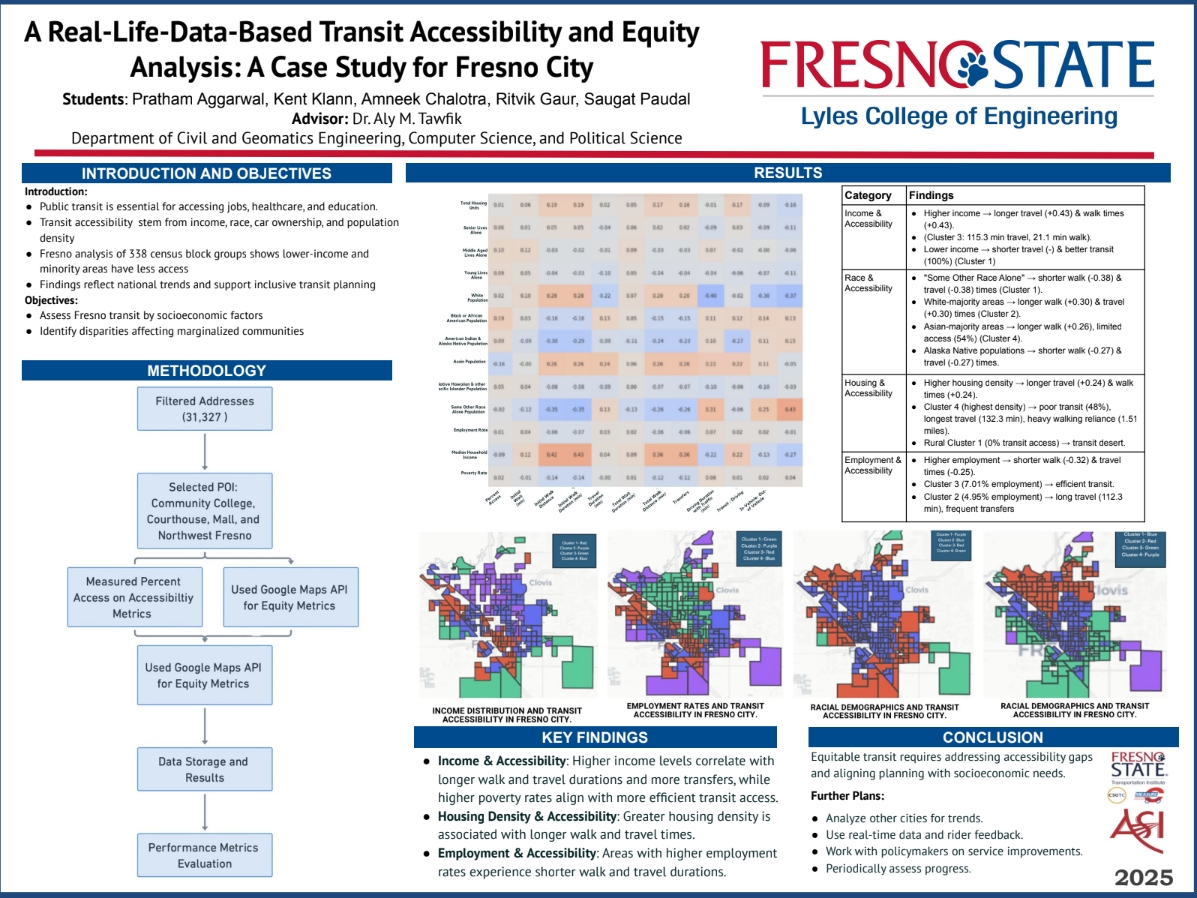
A Real-Life-Data-Based Transit Accessibility and Equity Analysis: A Case Study for
Fresno City
Students: Pratham Aggarwal, Kent Klann, Amneek Chalotra, Ritvik Gaur, Saugat Paudal
Mentors/Advisors: Dr. Aly Tawfik
Summary: Public transportation is essential for providing access to services, but not all communities
benefit equally. Disparities in transit accessibility often arise due to socioeconomic
factors such as income, race, car ownership, and population density. This study examines
equity gaps in transit accessibility through a case study of Fresno City, CA. Data
from 338 census block groups is analyzed, integrating transit accessibility metrics—such
as population access, travel times, walking distances, and transit-to-driving time
ratios—with equity indicators from census sources. Python libraries are used for data
processing and visualization to highlight disparities. The findings reveal significant
inequities, with lower-income and minority communities facing limited access to transit
services. These results align with similar studies and offer transportation engineers,
planners, and policymakers actionable insights to address inequities and improve public
transit systems for a more inclusive and equitable future.
{kind=link}
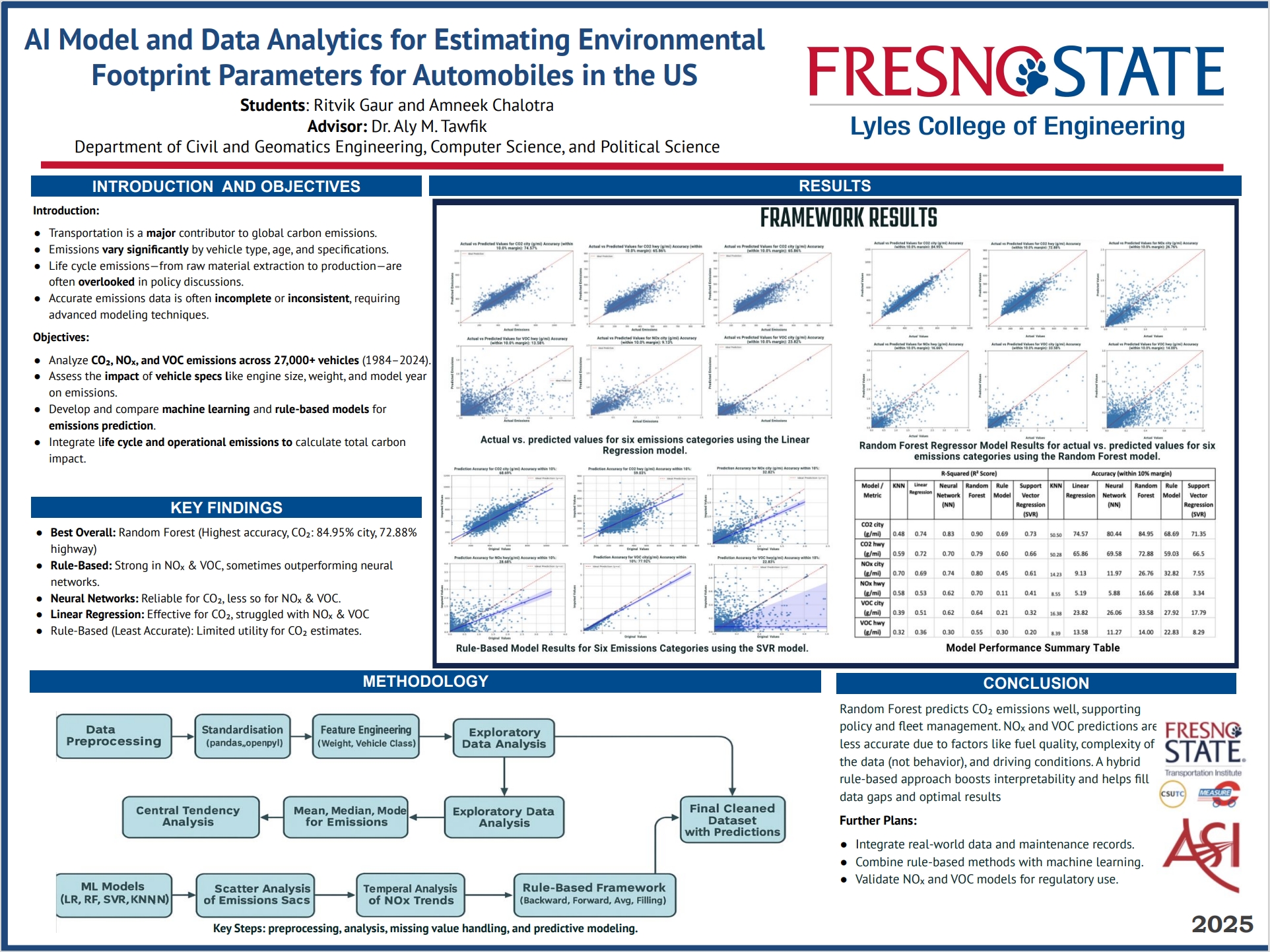
AI Model and Data Analytics for Estimating Environmental Footprint Parameters for
Automobiles in the US
Students: Ritvik Guar, Amneek Chalotra
Mentors/Advisors: Dr. Aly Tawfik
Sponsors: Fresno State Transportation Institute, Fresno County Measure C
Summary: This study examines carbon emissions from over 27,000 transportation modes, including
cars, eCars, and hybrids, from 1984 to 2024. It tracks CO₂, NOₓ, and VOC emissions
while analyzing vehicle specifications like engine displacement, weight, and model
year. To address incomplete data, machine learning and rule-based models were developed
and compared for emissions prediction. The study integrates historical data and life
cycle emissions, including production and supply chain impacts, to provide accurate,
policy-relevant insights. By supporting evidence-based policymaking and environmental
awareness, it contributes to global sustainability efforts.
{kind=link}
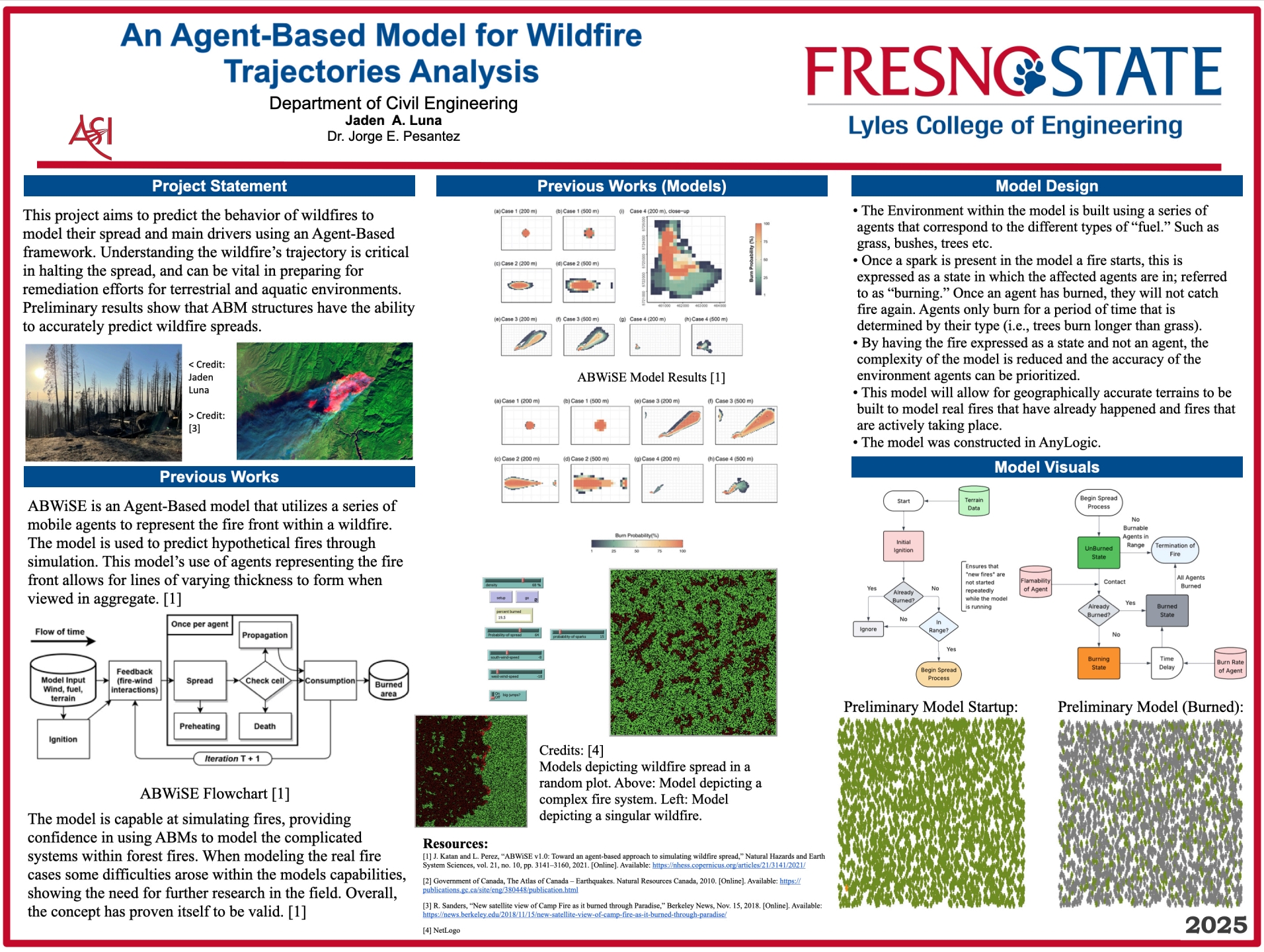
An Agent Based Model for Wildfire Trajectories Analysis
Students: Jaden Luna
Mentors/Advisors: Dr. Jorge Pesantez
Summary: Along the U.S. West Coast, the past few years have shown a strong increase in the
frequency and severity of wildfires. Fueled by drought-afflicted plant matter and
warming summers, wildfires threaten humans and the environment. The ash produced by
these fires poses a serious risk to the health of aquatic ecosystems of all kinds.
Understanding the wildfire trajectory is critical in halting the spread, and can be
vital in preparing for remediation efforts for terrestrial and aquatic environments.
This project predicts the behavior of these wildfires to model their spread and main
drivers. We have implemented a machine learning model to analyze satellite image data
collected from wildfires. This information can be used to find trends within the spread
of fires to predict their future spread. Preliminary results show that specific machine-learning
models may be more effective than regression models when predicting the wildfire path.
{kind=link}
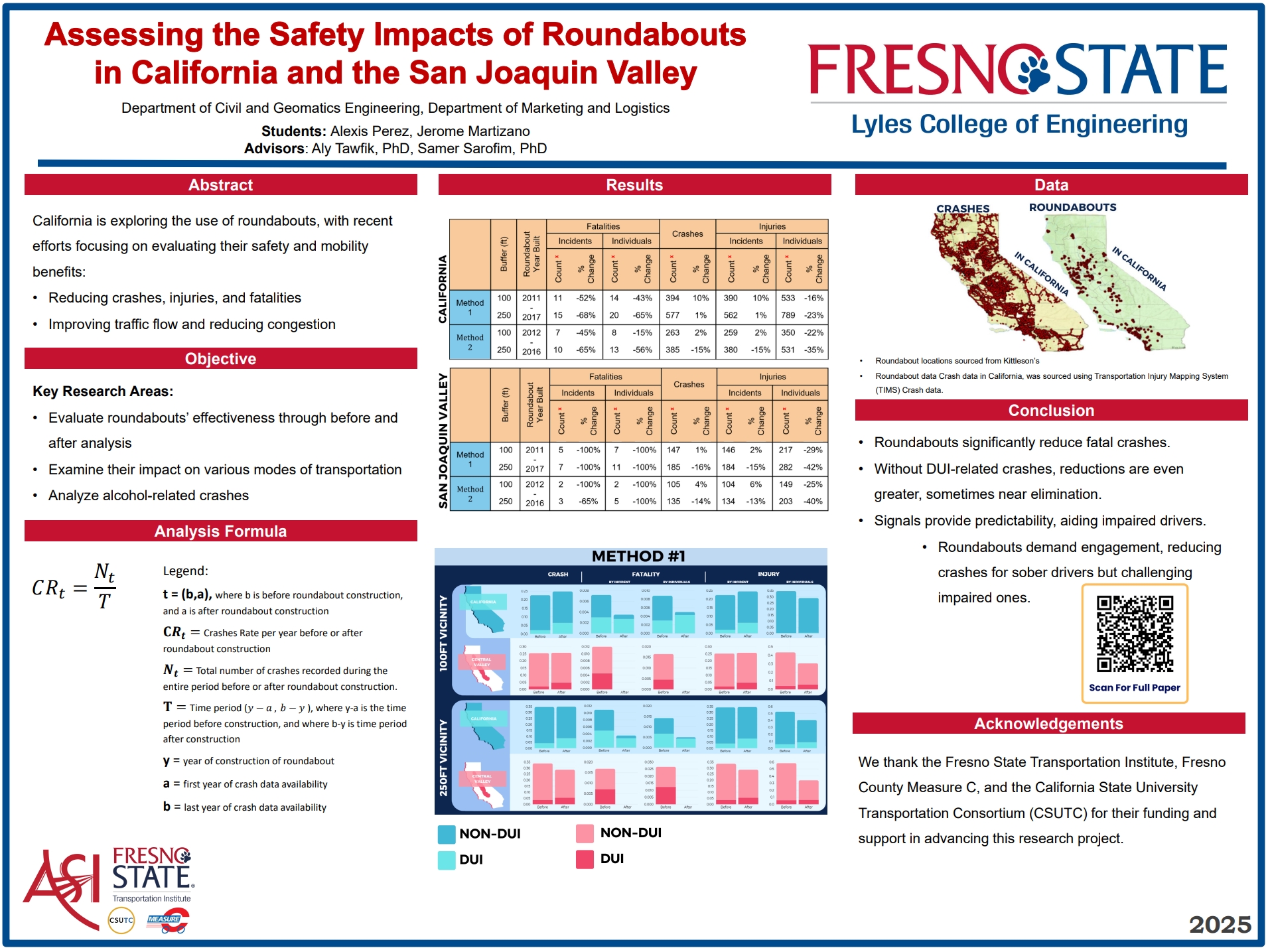
Assessing the Safety Impacts of Roundabouts in California and the San Joaquin Valley
Students: Alexis Perez, Jerome Martizano
Mentors/Advisors: Dr. Aly Tawfik
Summary: Roundabouts are designed to reduce traffic congestion, minimize accidents, and promote
more efficient vehicle movement compared to traditional signalized intersections.
Despite these advantages, public perceptions of roundabouts in California remain mixed,
with concerns often raised regarding their safety, usability, and effectiveness. This
work presents a quantitative methodology to assess the safety impacts of roundabouts.
This project compared different safety measures – e.g. fatalities, injuries and crashes
– at intersections before and after the implementation of roundabouts. Our geographic
focus is divided into two components: the entirety of California and the San Joaquin
Valley. The scope of the analysis examines the effects within a 100ft and 250ft buffer
zones around the intersections. Our crash data covered the years 2009 to 2019. We
excluded the 2020 crash data and beyond from our analysis due to the pandemic’s impact
on driving behavior. Using ArcGIS, we employed geoprocessing tools to prepare the
data for extraction, which was then further analyzed using MS Excel. The quantitative
findings evaluate the effectiveness of roundabouts in California post- construction,
specifically their impact on reducing crashes, injuries, and fatalities. The results
identify the safety benefits of implementing roundabouts, where quantifying these
benefits serves as an effective strategy for evidence-based decision making moving
forward.
{kind=link}
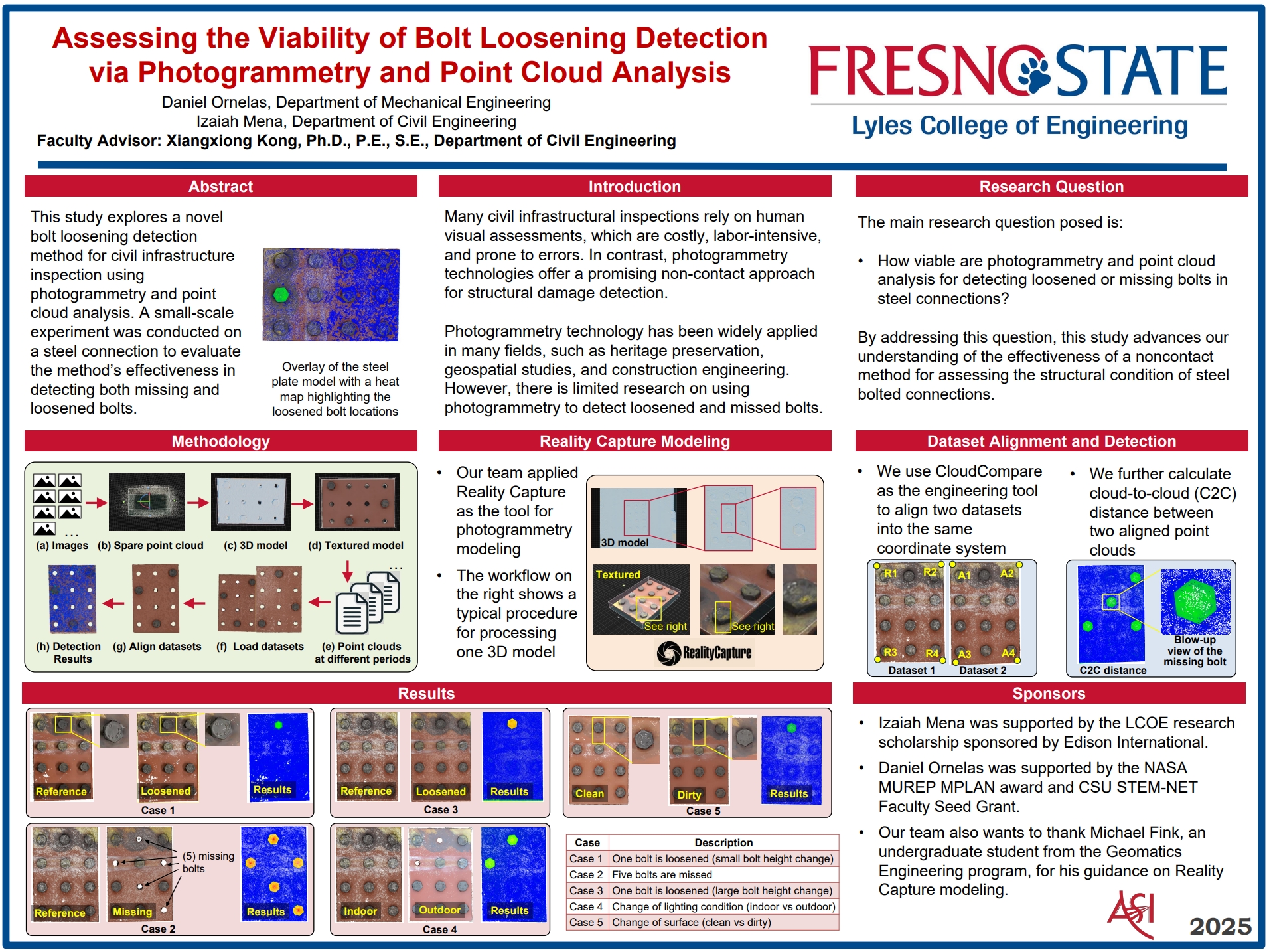
Assessing the Viability of Bolt Loosening Detection via Photogrammety and Point Cloud
Analysis
Students: Izaiah Mena, Daniel Ornelas
Mentors/Advisors: Dr. Xiangxiong Kong
Sponsors: NASA MUREP MPLAN; LCOE Research Scholarship Awarded offered by Edison
Summary: Bolted connections are crucial to everyday life and often go overlooked. Using a photogrammetry
model of the bolted connection can aid in inspecting important structures' bolted
connections. Images of the bolted connection are gathered and then processed to create
a 3D model and point cloud. The point cloud can then be compared to identify any loose
or missing bolts of the same bolted connection. In the samples gathered using a steel
plate with 12 bolt holes, the various conditions range from different lighting, resolution,
missing bolts, loose bolts, and surface conditions. The software identified all the
missing or loose bolts with a heat map during the different condition tests.
{kind=link}
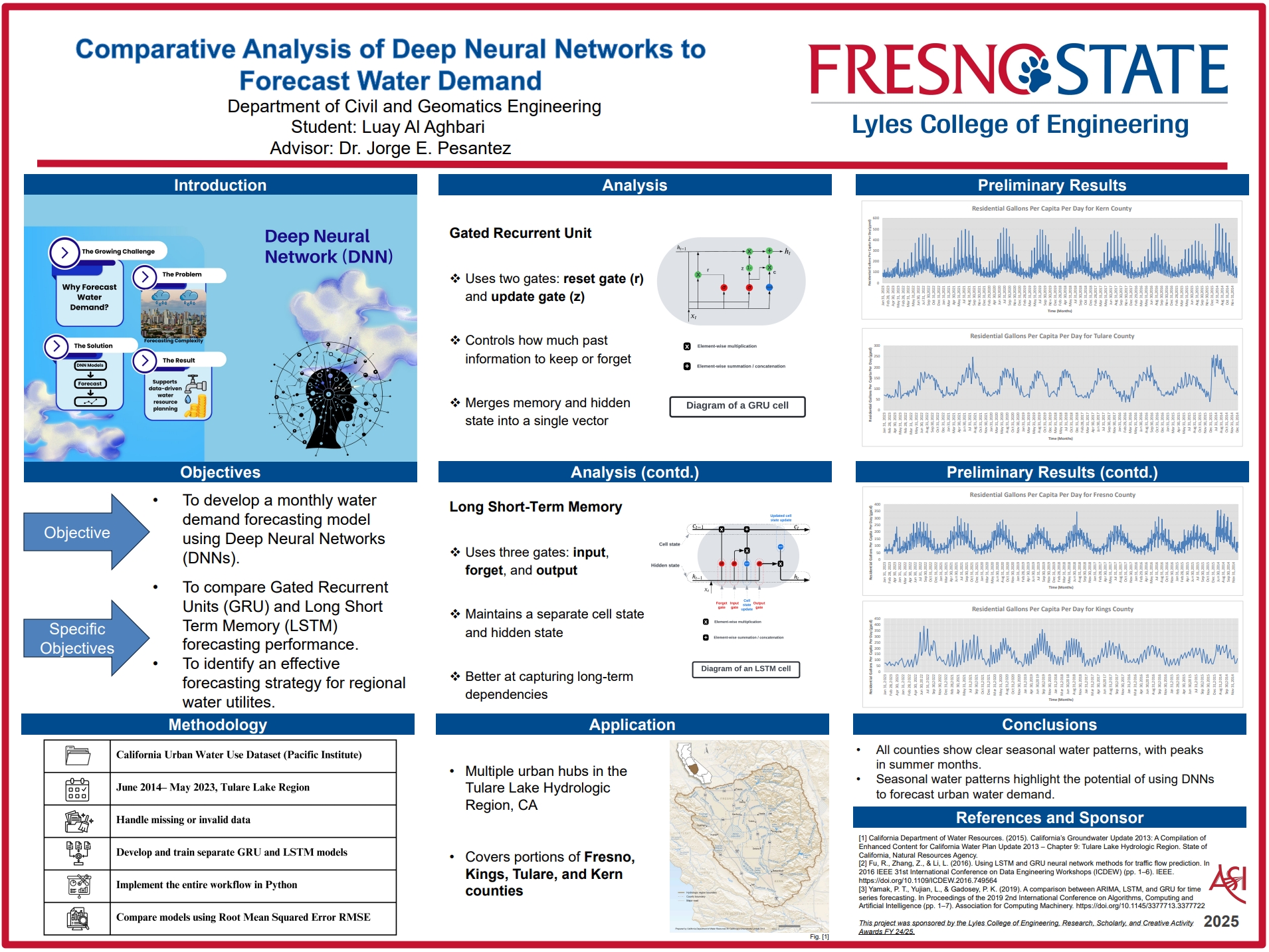
Comparative Analysis of Deep Neural Networks to Forecast Water Demand
Students: Luay Al Aghbari
Mentors/Advisors: Dr. Jorge Pesantez
Summary: Effective water resources management requires precise water demand forecasting in
urban regions and the need for accurate forecasting in locations with changes in hydrology
and climate has become more essential. This research presents a water demand forecasting
model using Deep Neural Network (DNN) models. Particularly, it compares the performance
of Gated Recurrent Units (GRU) and Long Short Term Memory (LSTM) networks. For this
research, we utilize the California Urban Water Use dataset released by the Pacific
Institute to model monthly water use in the hydrologic region of Tulare Lake between
June 2014 and May 2023. Several features were considered in the dataset, including
the supplier name, county, the total served population, the 2014 reference population,
reported potable water production, residential water use percentages, and calculated
residential gallons per capita per day (r-gpcd). Following other research, this project
looks at the methods of evaluation of the models explaining three fundamental performance
indicators which are predictive accuracy, temporal dynamics, and computational efficiency.
The two models effectively reconstructed long-term dependencies in the consumption
patterns, enabling them to explain consumption and seasonal patterns. The research
strengthens the performance of the model through the application of various critical
data preprocessing and feature engineering methods. The results highlight the possibility
of using the DNN architecture for urban water demand forecasting. They also suggest
that these models may assist in developing sustainable water resource management approaches
in urban settings.
{kind=link}
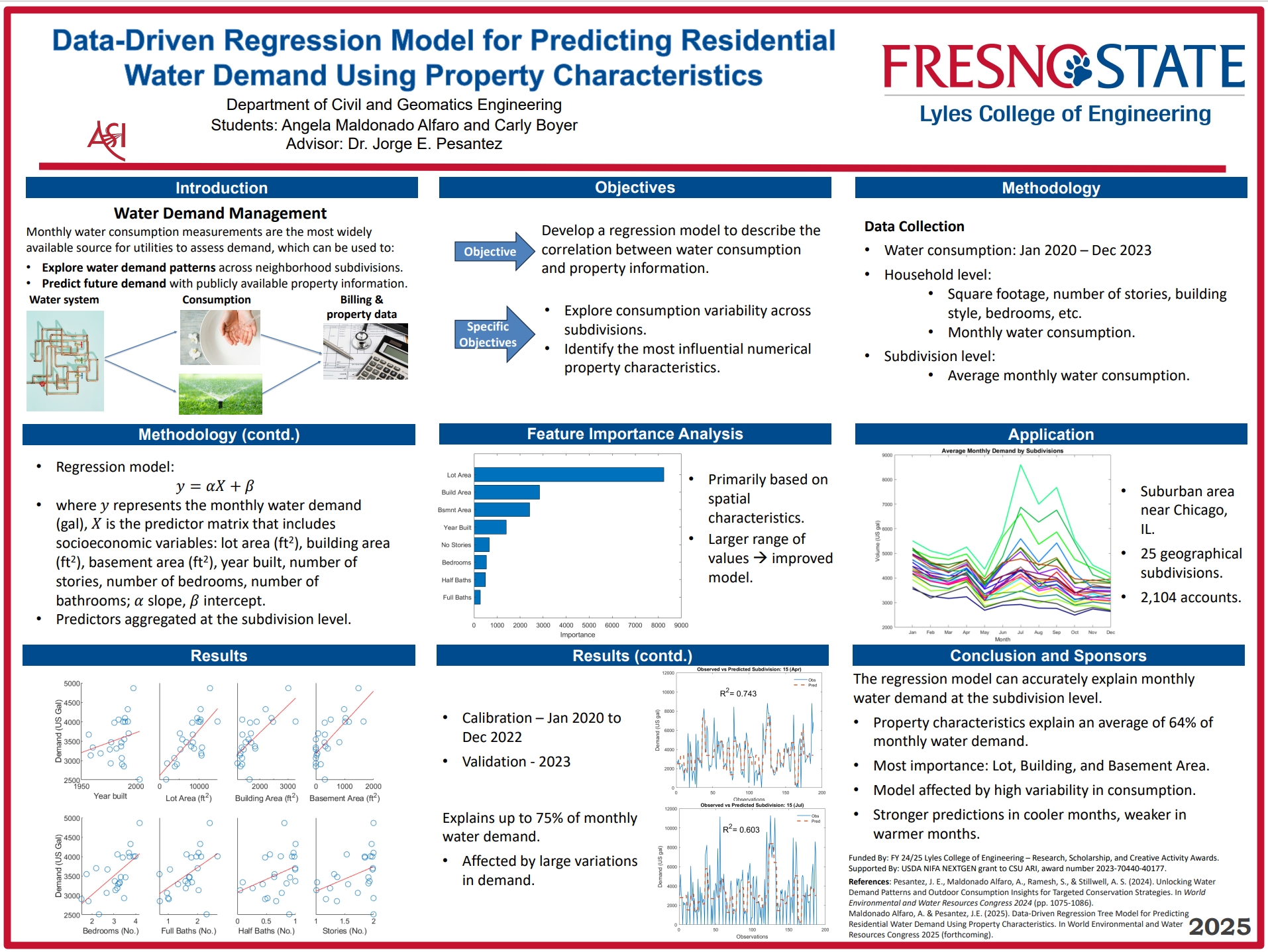
Data-Driven Regression Model for Predicting Residential Water Demand Using Property
Characteristics
Students: Angela Maldonado Alfaro, Carly Boyer
Mentors/Advisors: Dr. Jorge Pesantez
Summary: Water demand management is paramount to meeting the potable water needs of the population.
Utilities forecast residential water demand utilizing monthly water consumption data
and property information. This research applies a data-driven approach to analyze
monthly water consumption patterns at a spatially aggregated level and their corresponding
aggregated property characteristics to predict future demand. A regression tree model
applies household characteristics as input variables and responds with monthly water
demand. The model explains an average of 62% of monthly demand across subdivisions,
with lot and building areas as the most important predictors. A stronger correlation
was found in cooler months due to lower consumption variation compared to warmer months.
Aggregating demand at the annual level found that building area and basement area
explain 74% and 79% of water demand, respectively. Practitioners can use the proposed
model in water infrastructure long-term planning to account for socioeconomic effects
at multiple temporal resolutions.
{kind=link}
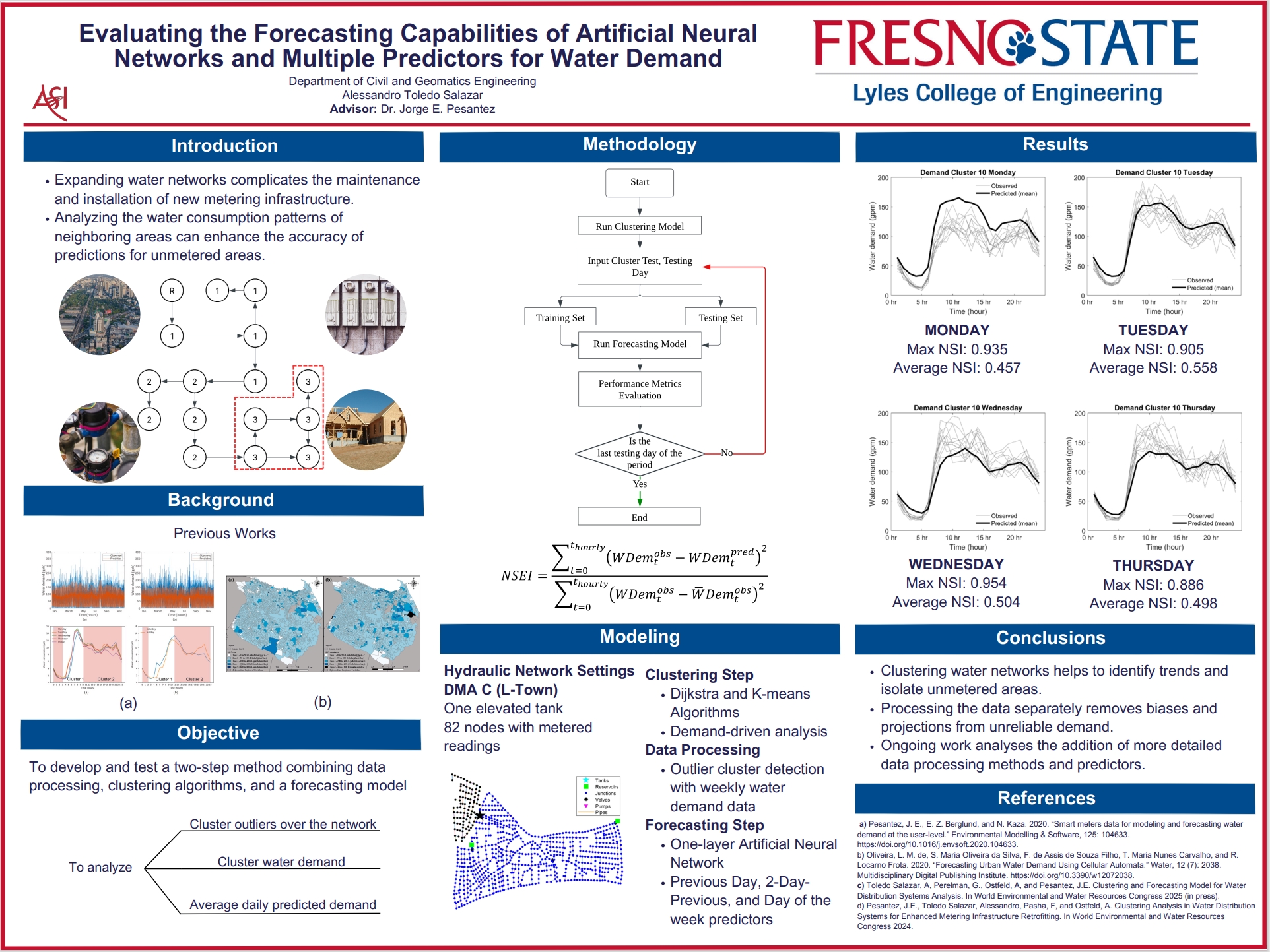
Evaluating the Forecasting Capabilities of Artificial Neural Networks and Multiple
Predictors for Water Demand
Students: Alessandro Toledo
Mentors/Advisors: Dr. Jorge Pesantez
Sponsors: LCOE student Research Support
Summary: Forecasting water consumption accurately is a great challenge for engineers and operators
to model water distribution systems (WDS) dynamics for management and operations.
The constant expansion of WDSs may impede water providers to collect all the demand
data across the network. To approach this data gap, recent studies have applied machine
learning to analyze operational costs and demand shifts over time. Artificial Neural
Networks can support a detailed analysis of trends in water demand analysis to approach
missing information and outliers. Due to the dimension of WDSs and the modeling complexity,
aggregating demand to a subnetwork level can enhance the capabilities of a neural
network to process data while identifying patterns and anomalies along the entire
water network. This project aggregates customer-level into subnetwork-level water
demand values using a clustering step. Then, a neural network is trained with the
average water demand data from every subnetwork to predict one or multiple timesteps
at other subnetworks. Our method proposes a data processing step that clusters the
network in a defined number of subnetworks to predict the consumption of a target
area. This method allows water providers to analyze demand dynamics regardless of
inaccessible accounts and localized issues.
{kind=link}
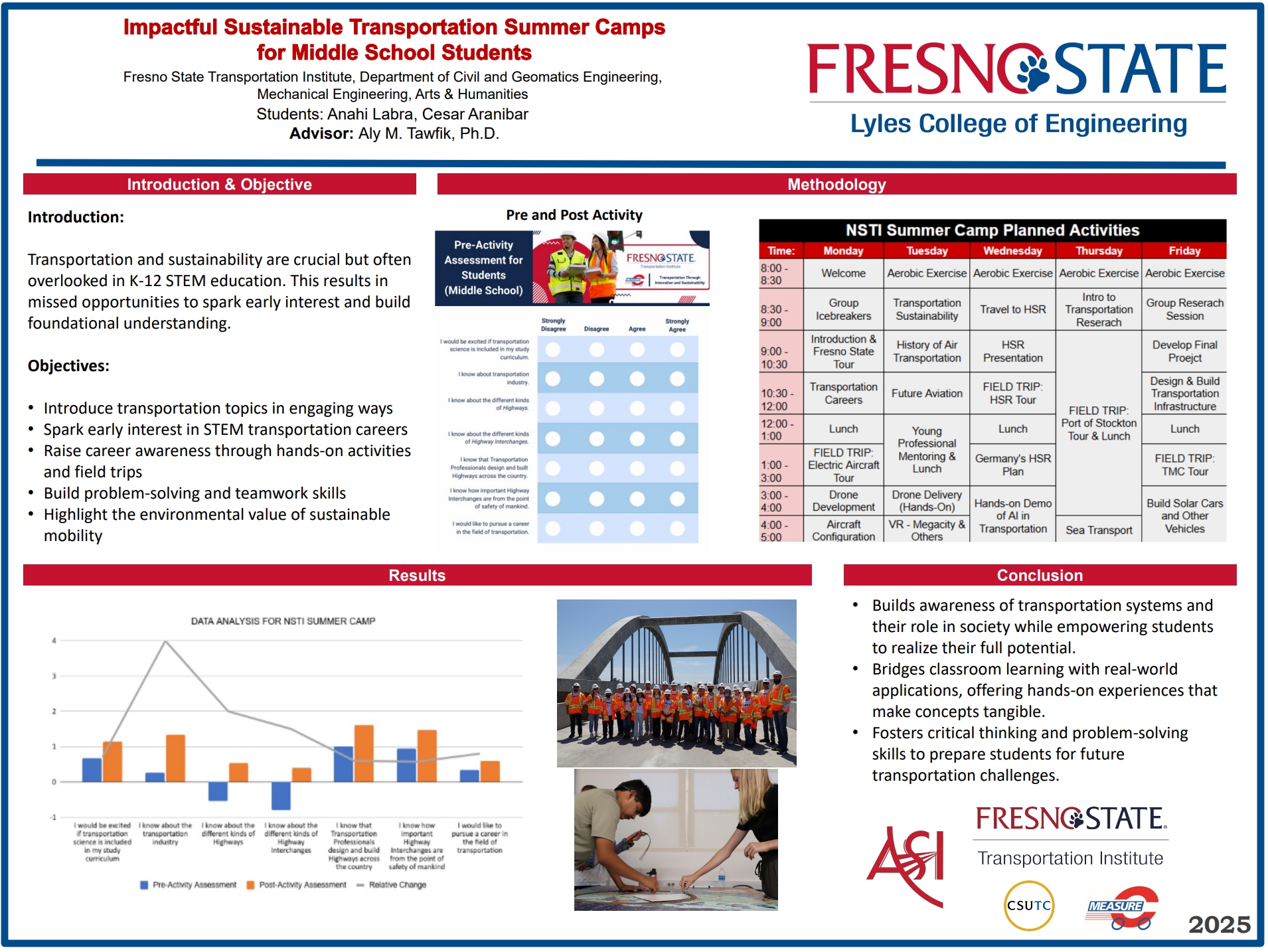
Impactful Sustainable Transportation Summer Camps for Middle School Students
Students: Cesar Aranibar, Anahi Labra
Mentors/Advisors: Dr. Aly Tawfik
Sponsors: Fresno State Transportation Institute
Summary: The Fresno State Transportation Institute (FSTI) addresses the limited exposure of
K-12 students to transportation and sustainability careers through its innovative
Summer Camps. These programs aim to inspire middle school students by providing hands-on
activities, field trips, and mentorship. The Transportation Industry Summer Academy
introduces various career paths and fosters STEM skills through practical projects.
At the same time, the Bike Camp emphasizes sustainable mobility and bike safety. Pre-
and post-assessments revealed significant increases in students' knowledge and enthusiasm
for transportation fields. By combining academic sessions with real-world applications,
FSTI’s camps effectively enhance students’ understanding of transportation’s societal
impact and sustainability’s importance, preparing a future workforce equipped to tackle
transportation challenges.
{kind=link}
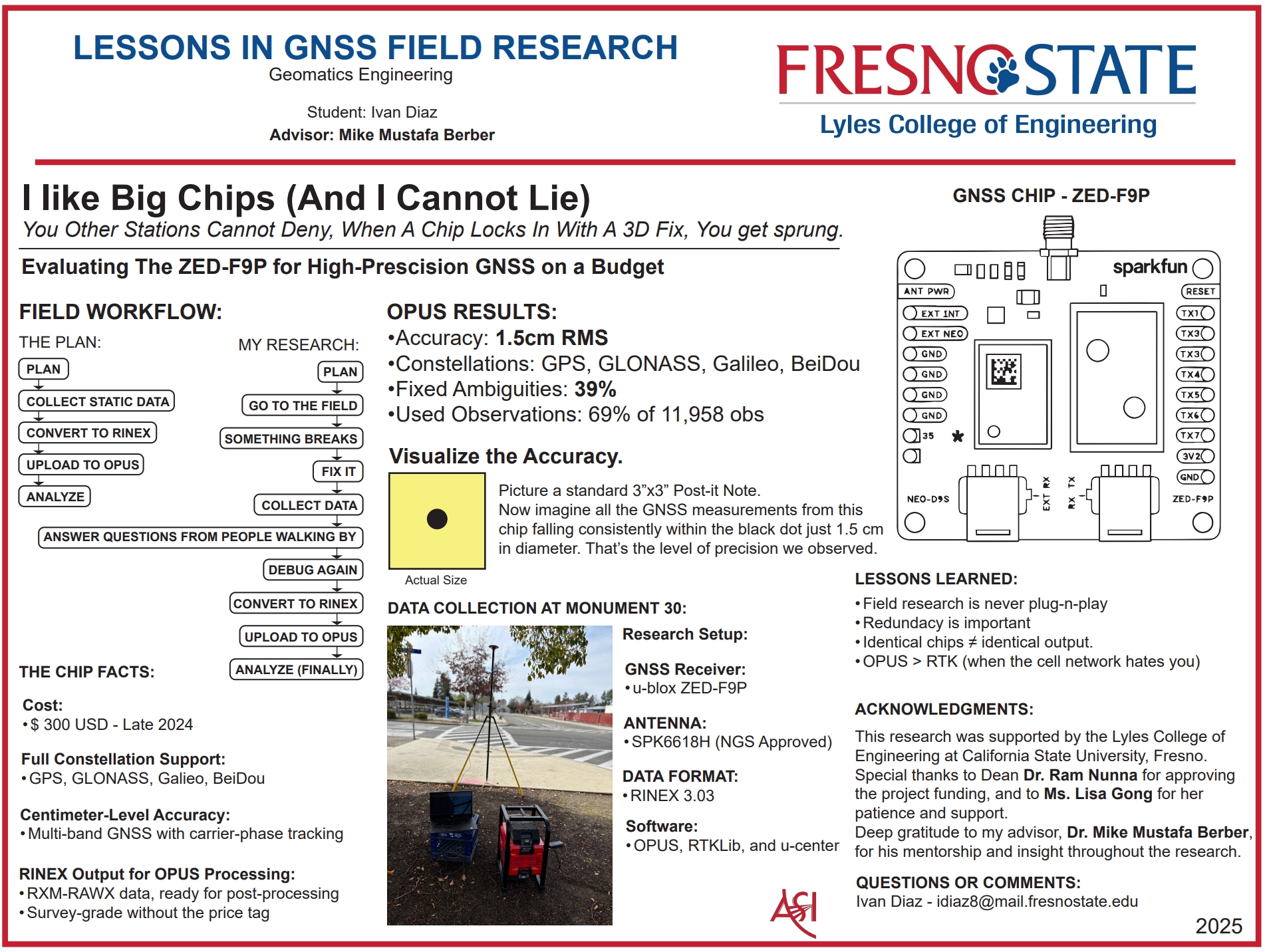
Lessons in GNSS Field Research
Students: Ivan Diaz
Mentors/Advisors: Dr. Mike Mustafa Berber
Summary: This research investigates the performance of low-cost GNSS receiver systems using
u-blox technology for surveying applications. By comparing static and Real-Time Kinematic
(RTK) survey methods, the study aims to evaluate whether the ZED-F9P GNSS chip—offering
1 cm accuracy at $400—can serve as a viable alternative to traditional high-precision
systems that cost $20,000-$30,000. Two GNSS receivers will be designed and tested:
one operating in static mode and another in RTK mode. Both systems will be deployed
on a survey network established on Fresno State campus, with results compared against
known coordinates to assess positional accuracy. Through repetitive real-world testing
across various environments, this research will determine if the ZED-F9P consistently
delivers its advertised precision and reliability. Findings will help determine whether
this significantly more affordable technology can meet industry standards for applications
requiring high-precision positioning, potentially making advanced surveying technology
more accessible to a broader range of users.
{kind=link}
Mobility Behavior and Patterns using Cell-Phone Trace Data: A Case Study of Fresno,
California
Students: Alexis Zane Alexander
Mentors/Advisors: Dr. Aly Tawfik
Sponsors: Fresno State Transportation Institute, Measure C, CSUTC
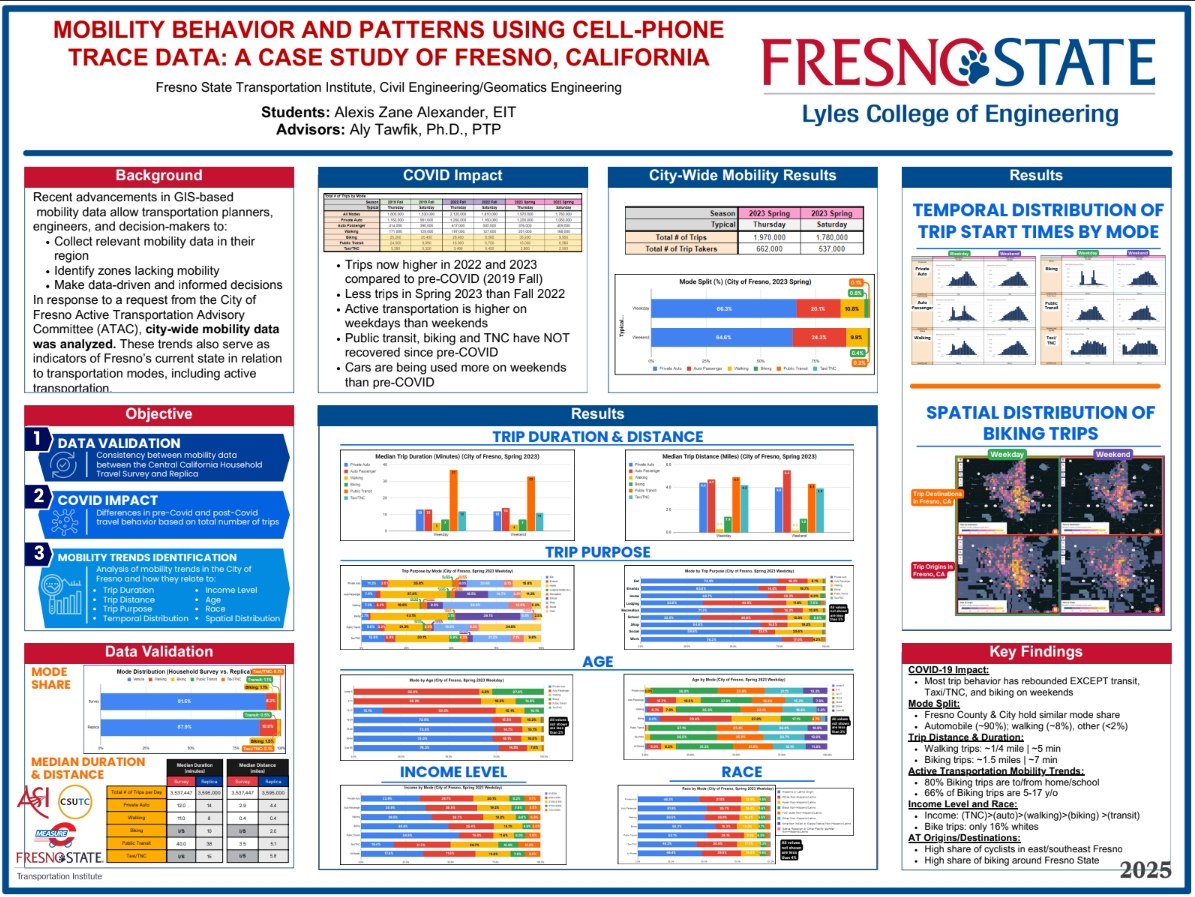
Summary: This case study investigates the impact of seasonal variations, the COVID-19 pandemic,
and demographic factors on mobility behavior in Fresno County, California, using a
synthesized GIS dataset derived from cell-phone trace data. The study compares data
from the Replica platform with traditional travel surveys and analyzes mobility patterns
across six transportation modes (private auto, walking, biking, public transit, etc.)
in Spring 2023. Key findings highlight the dominance of private vehicle use (nearly
90% of trips) in Fresno, with notable trends in cycling among youth (ages 5-17) near
schools and universities. The case study emphasizes the need for improved bike infrastructure
for vulnerable cyclists and suggests that targeted infrastructure development in lower-equity
or high-active transportation areas could enhance multimodal mobility in suburban
and rural cities, which are typically car-dependent.
{kind=link}
Nationwide Transit Accessibility Analysis Using Real-Life Data
Students: Pratham Aggarwal, Kent Klann, Mathias Duque, Aly Mahmoud
Mentors/Advisors: Dr. Aly Tawfik
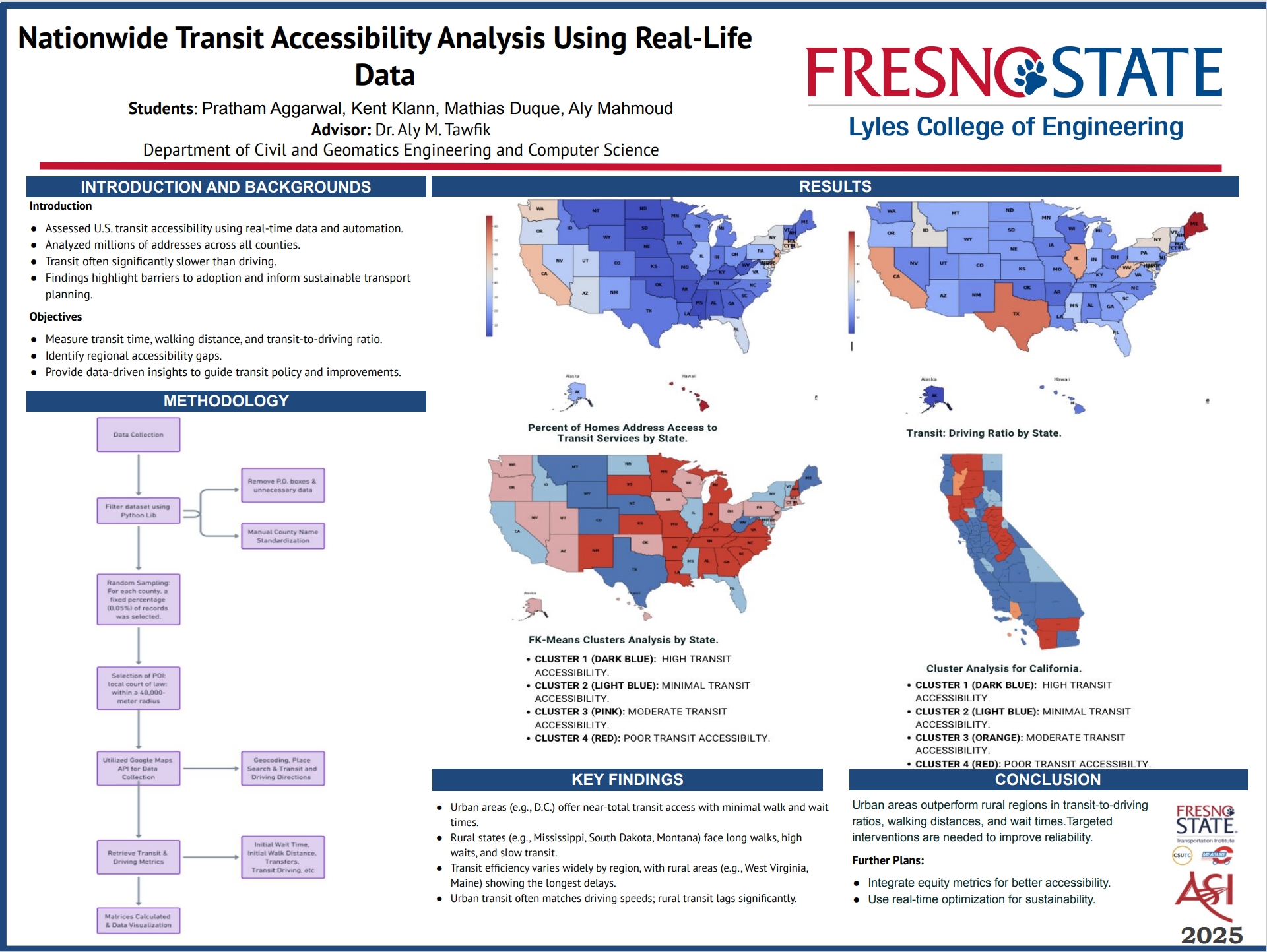
Summary: Public transportation plays a crucial role in serving the mobility needs of different
populations everywhere, yet transit accessibility often varies by location and regional
factors. Building on previous work, this research project undertakes a nationwide
evaluation of transit accessibility, leveraging Python and APIs to streamline the
process of computing transit accessibility using real-life data. We gathered real-time
transit data for millions of addresses across all counties in the US, calculating
key metrics such as transit travel times, walking distances and times, and transit-to-driving
travel time ratios. Python and essential libraries were extensively used to automate
geocoding, place search, directions, and data processing, allowing for an efficient,
data-rich approach to measuring and comparing transit accessibility nationwide. Initial
findings reflect trends observed in smaller-scale studies: transit travel times remain
substantially longer than driving times in most regions. These ratios, combined with
other accessibility indicators, underscore significant gaps in transit efficiency
that may hinder public willingness to shift from personal vehicles to public transit.
By providing detailed insights into these accessibility disparities, this research
project offers valuable real-time data to make policies that aim to improve transit
reliability, encouraging more sustainable transportation options nationwide.
{kind=link}
Theoretical Stress Analysis of Beams
Students: Serene Shwiyhat, Kim Robles
Mentors/Advisors: Dr. Arezoo Sadrinezhad
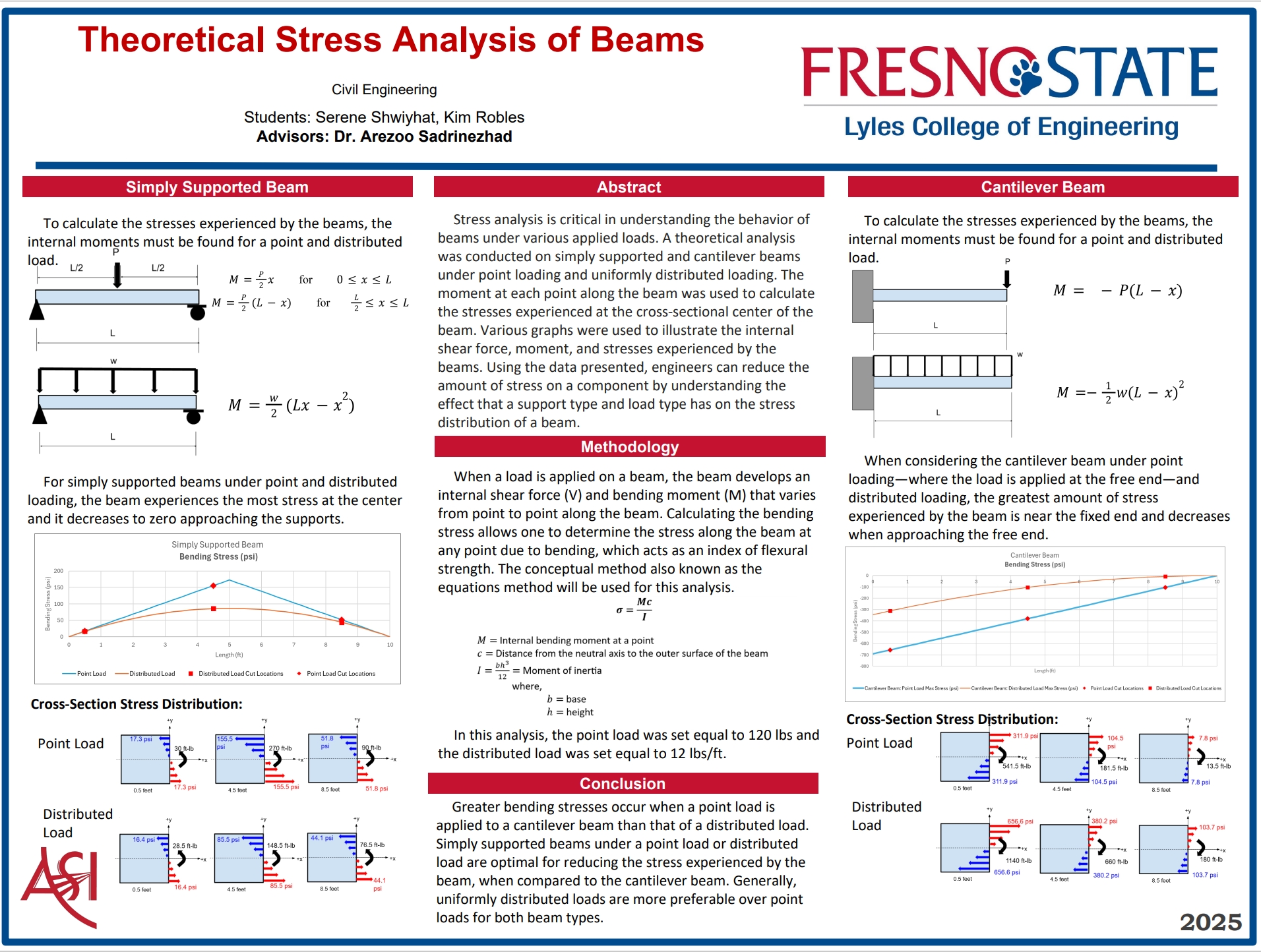
Summary: Stress analysis is critical in understanding the behavior of beams under various
applied loads. A theoretical analysis was conducted on simply supported and cantilever
beams under point loading and uniformly distributed loading. The moment at each point
along the beam was used to calculate the stresses experienced at the cross-sectional
center of the beam. Various graphs were used to illustrate the internal shear force,
moment, and stresses experienced by the beams. Using the data presented, engineers
can reduce the amount of stress on a component by understanding the effect that a
support type and load type has on the stress distribution of a beam.
{kind=link}
Transformative Location Service Platforms: Comparing Geospatial Data, APIs, Features,
and Application
Students: Ritvik Gaur, Pratham Aggarwal, Saugat Paudal, Amneek Chalotra
Mentors/Advisors: Dr. Aly tawfik
Sponsors: Fresno State Transportation Institute, Fresno County Measure C
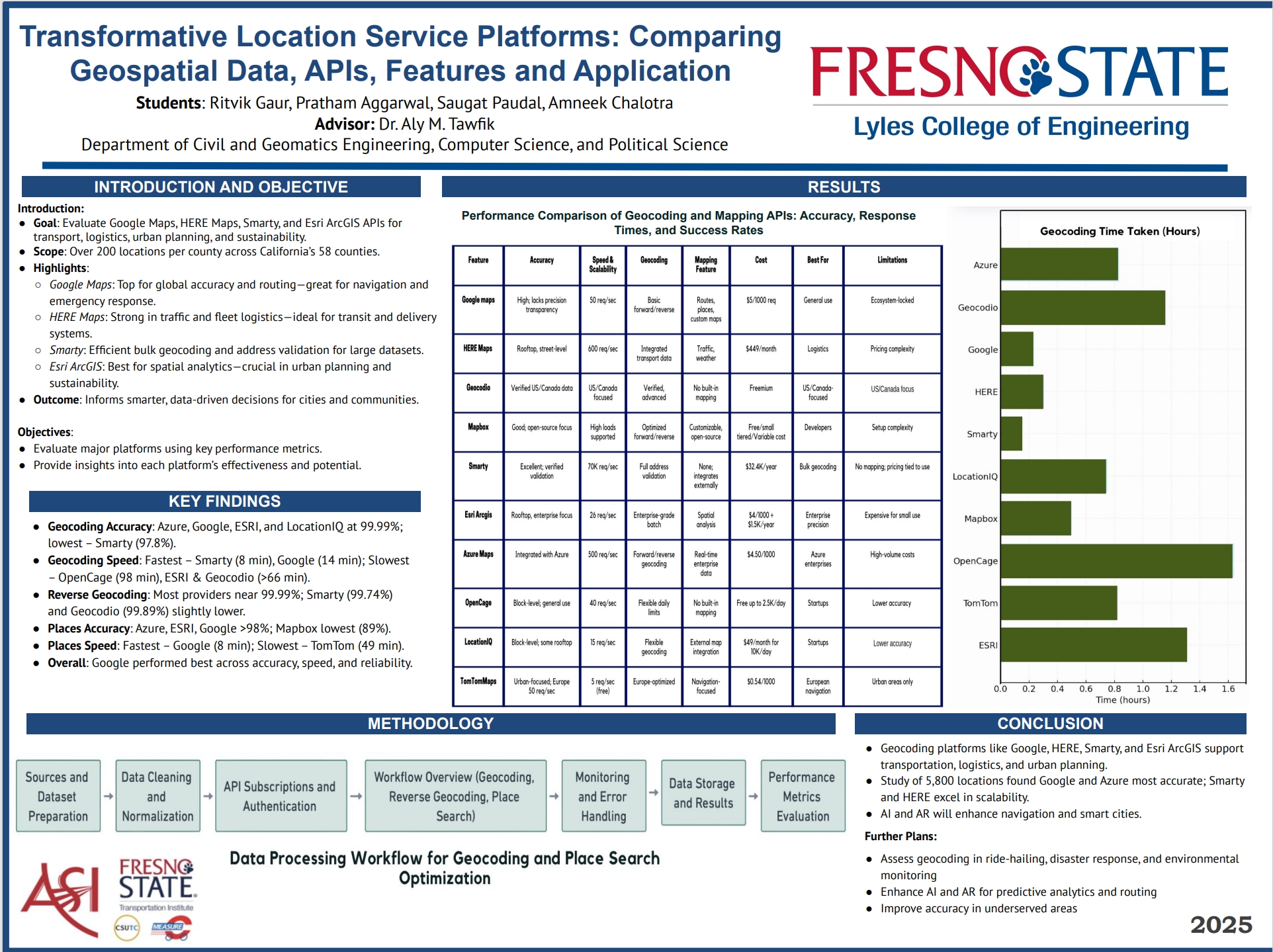
Summary: This study evaluates geospatial service APIs—Google Maps, HERE Maps, Smarty, and
Esri ArcGIS—to address challenges in transportation, logistics, urban planning, and
sustainability. Using data from over 200 locations per county across California's
58 counties, it leverages Python, Flask, and API integration to measure geocoding
accuracy, response time, scalability, and advanced features like routing and distance
matrix computations. Google Maps excels in global accuracy and routing, making it
suitable for emergency response and urban navigation. HERE Maps offers strong capabilities
in traffic analysis and fleet management, supporting logistics and public transit
optimization. Smarty is effective for bulk geocoding and address validation, handling
large datasets efficiently. Esri ArcGIS provides advanced spatial analytics critical
for urban planning and sustainability efforts. It offers actionable insights to help
policymakers, urban planners, and businesses make informed, data-driven decisions
to build smarter cities and sustainable communities.
{kind=link}
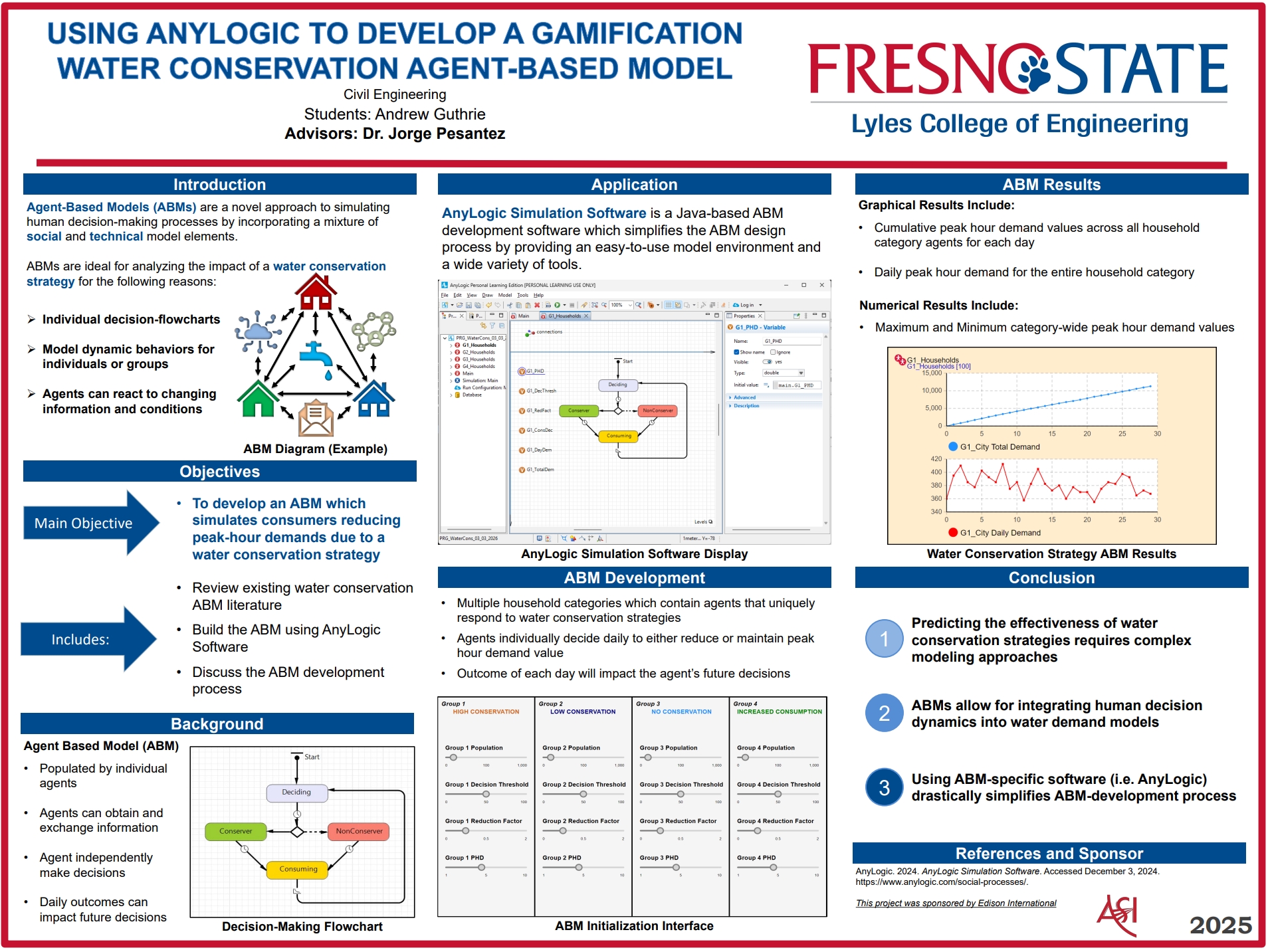
Using AnyLogic to Develop a Gamification Water Conservation Agent-Based Model
Students: Andrew Guthrie
Mentors/Advisors: Dr. Jorge Pesantez
Sponsors: Edison International
Summary: The implementation of consumption-based feedback as a water conservation method has
proven effective in decreasing peak-hour residential water demands. This reduces operational
costs by reducing maximum capacity and power consumption needs during peak consumption
periods. One method for increasing water conservation is implementing consumption-based
feedback systems for individual consumers. This feedback system can then utilize gamification
by introducing a competitive element, encouraging consumers to shift peak-hour water
consumption to off-peak hours. In this study, we research the use of AnyLogic modeling
software and develop a modeling strategy to simulate implementing a gamification-based
water conservation strategy.
{kind=link}
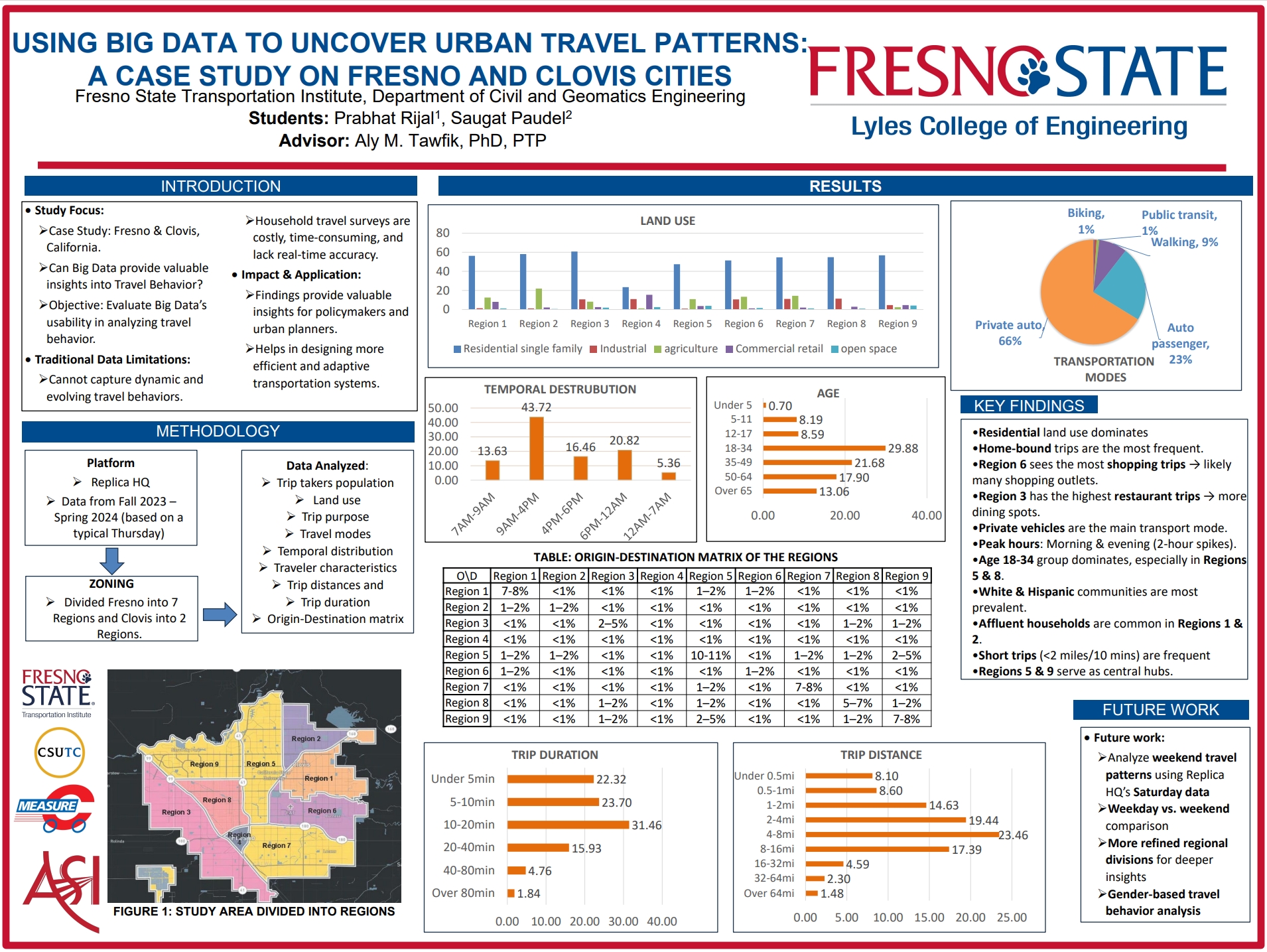
Using Big Data to Uncover Urban Travel Patterns: A Case Study on Fresno and Clovis
Cities
Students: Prabhat Rijal, Saugat Paudel
Mentors/Advisors: Dr. Aly Tawfik
Summary: Understanding travel behavior, including mode choices and mobility patterns, is critical
for planning and developing efficient transportation systems, for example, optimizing
resource allocation over the different transportation modes to offer suitable and
equitable alternative transportation options. Traditionally, large-scale survey data,
such as household travel surveys, have been used to capture and model travel behavior.
However, recent technological advances have allowed for novel sources of data. Data
from novel sources (such as mobile location data and consumer and resident data) are
not as commonly utilized, even though they can provide valuable insights into individual
travel behaviors. These novel data sources offer high accuracy and relevance for transportation
analysis. This research presents a case study utilizing one of these novel datasets
to analyze and understand spatial and modal travel patterns in Fresno and Clovis,
California. The used dataset was procured from Replica HQ. Replica HQ’s data are sourced
from different sources, including mobile location data, consumer and resident data,
the built environment, economic activity (such as payment network and merchant acquisition
data), and ground truth data, and fused to offer a more comprehensive view of travel
behaviors. The findings of our work provide critical insights into the strengths and
limitations of utilizing these novel data sources to understand travel behaviors and
patterns by different transportation modes. These insights provide valuable information
for transportation planners and policymakers that can aid them in developing more
efficient and well-adapted transportation systems in their cities and regions.
{kind=link}
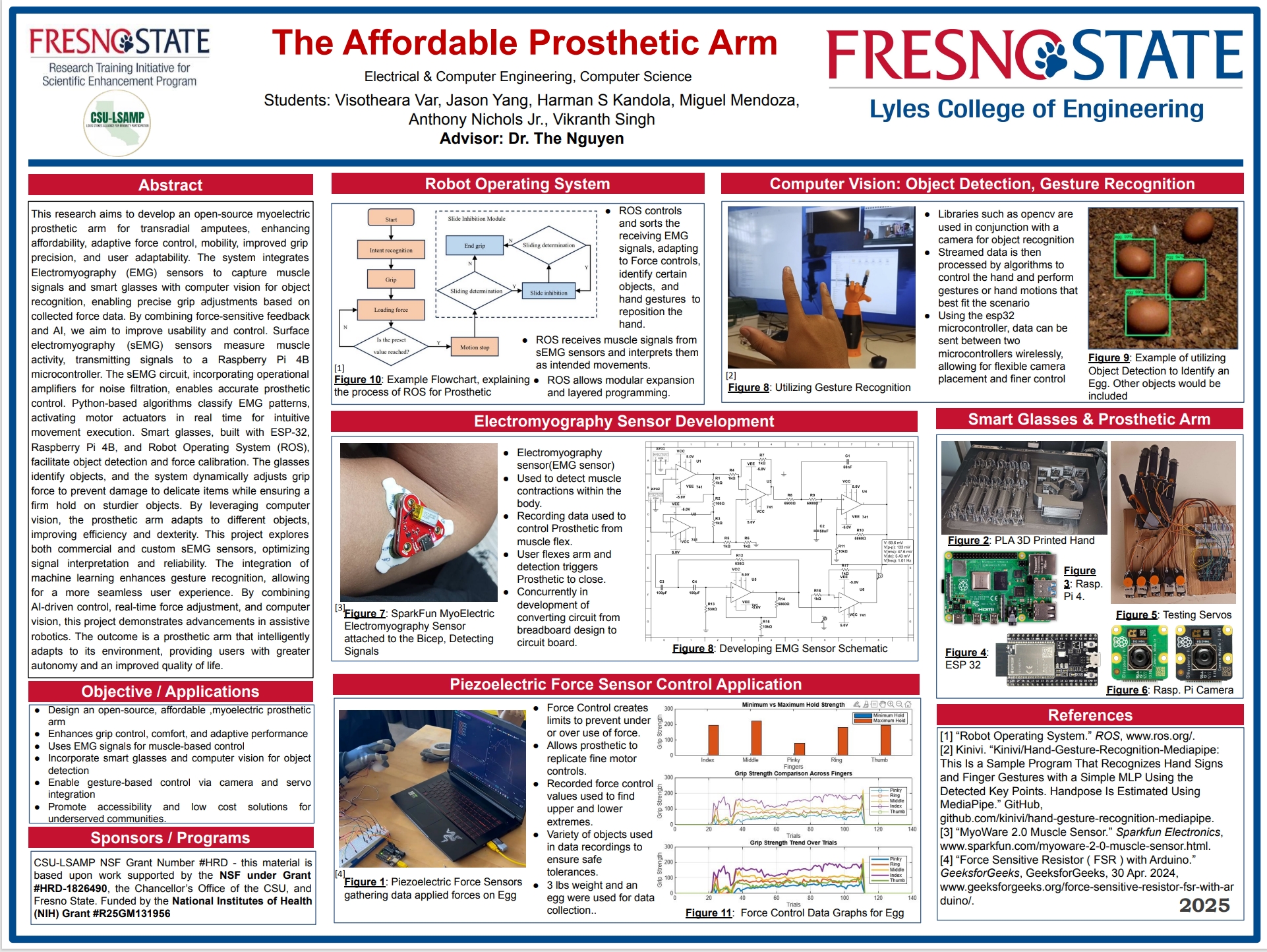
The Affordable Prosthetic Arm
Students: Visotheara Var, Jason Yang, Harman Kandola, Vikranth Singh, Miguel Mendoza, Anthony
Nichols Jr.
Mentors/Advisors: Dr. The Nguyen
Sponsors: LSAMP
Summary: This research aims to develop an open-source myoelectric prosthetic arm for transradial
amputees, enhancing affordability, adaptive force control, mobility, improved grip
precision, and user adaptability. The system integrates Electromyography (EMG) sensors
to capture muscle signals and smart glasses with computer vision for object recognition,
enabling precise grip adjustments based on collected force data. By combining force-sensitive
feedback and AI, we aim to improve usability and control. Surface electromyography
(sEMG) sensors measure muscle activity, transmitting signals to a Raspberry Pi 4B
microcontroller. The sEMG circuit, incorporating operational amplifiers for noise
filtration, enables accurate prosthetic control. Python-based algorithms classify
EMG patterns, activating motor actuators in real time for intuitive movement execution.
Smart glasses, built with ESP-32, Raspberry Pi 4B,and Robot Operating System (ROS),
facilitate object detection and force calibration. The glasses identify objects, and
the system dynamically adjusts grip force to prevent damage to delicate items while
ensuring a firm hold on sturdier objects. By leveraging computer vision, the prosthetic
arm adapts to different objects, improving efficiency and dexterity. This project
explores both commercial and custom sEMG sensors, optimizing signal interpretation
and reliability. The integration of machine learning enhances gesture recognition,
allowing for a more seamless user experience. By combining AI-driven control, real-time
force adjustment, and computer vision, this project demonstrates advancements in assistive
robotics. The outcome is a prosthetic arm that intelligently adapts to its environment,
providing users with greater autonomy and an improved quality of life.
{kind=link}
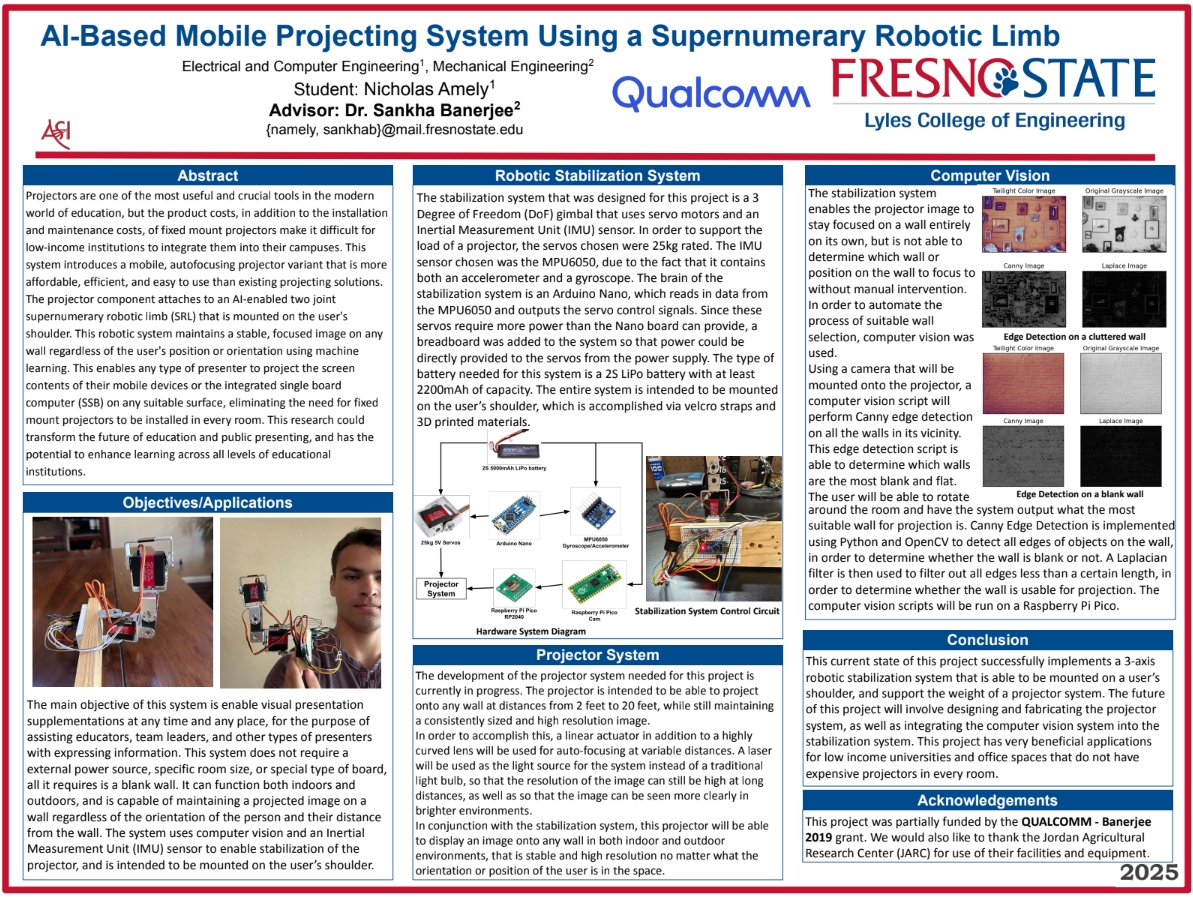
AI-Based Mobile Projecting System Using a Supernumerary Robotic Limb
Students: Nicholas Amely
Mentors/Advisors: Dr. Sankha Banerjee
Sponsors: Qualcomm
Summary: Projectors are one of the most useful and crucial tools in the modern world of education,
but the product costs, in addition to the installation and maintenance costs, of fixed
mount projectors make it difficult for low-income institutions to integrate them into
their campuses. This system introduces a mobile, autofocusing projector variant that
is more affordable, efficient, and easy to use than existing projecting solutions.
The projector component attaches to an AI-enabled two joint supernumerary robotic
limb (SRL) that is mounted on the user's shoulder. This robotic system maintains a
stable, focused image on any wall regardless of the user's position or orientation
using machine learning. This enables any type of presenter to project the screen contents
of their mobile devices or the integrated single board computer (SSB) on any suitable
surface, eliminating the need for fixed mount projectors to be installed in every
room. This research could transform the future of education and public presenting,
and has the potential to enhance learning across all levels of educational institutions.
{kind=link}
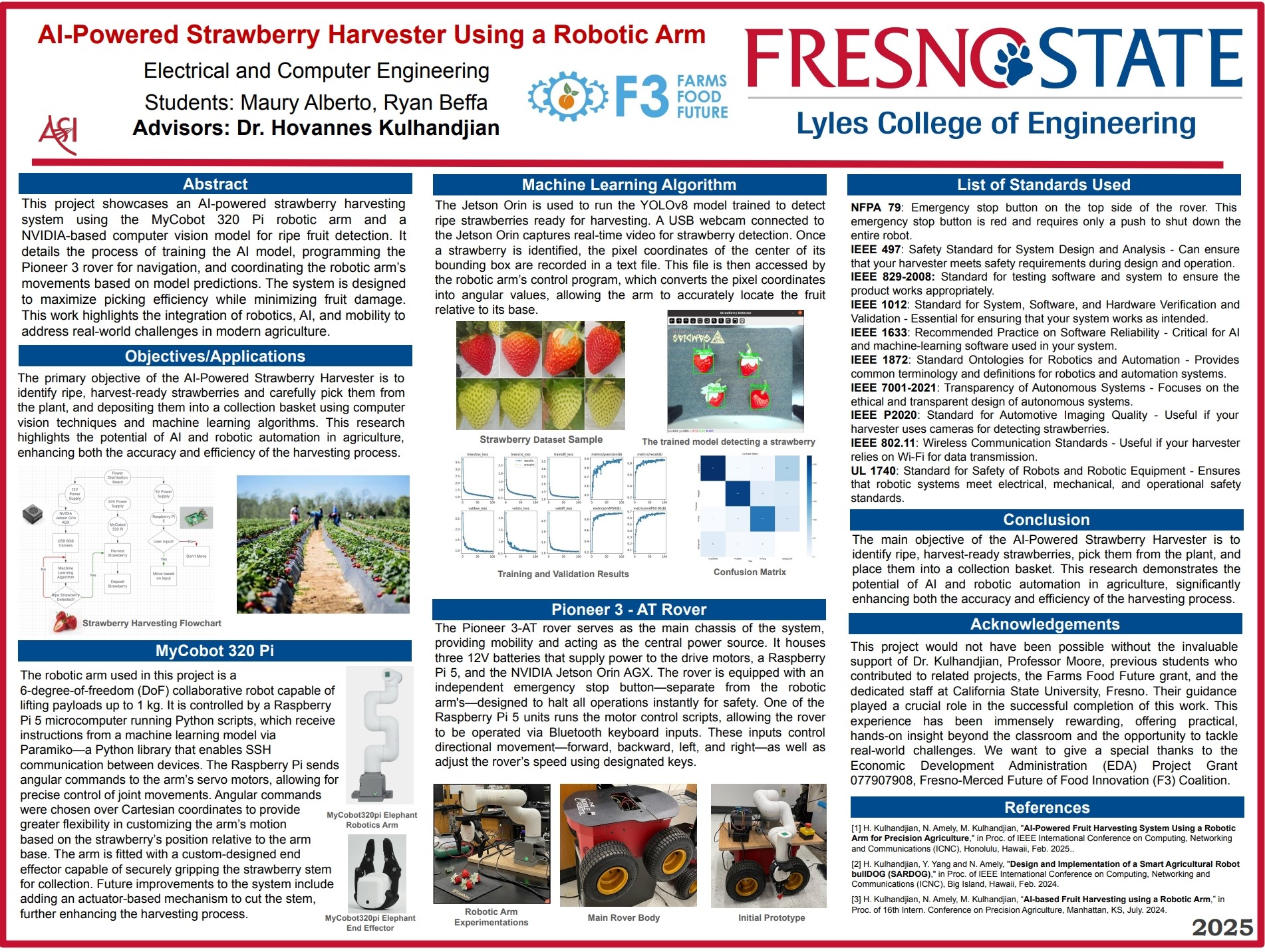
AI-Powered Strawberry Harvester Using a Robotic Arm
Students: Ryan Beffa, Maury Alberto
Mentors/Advisors: Dr. Hovannes Kulhandjian, Roger Moore
Sponsors: F3 Grant
Summary: An AI-powered strawberry harvester utilizes advanced robotics and machine learning
to automate fruit picking efficiently. The system features a myCobot 320 Pi robotic
arm mounted on a mobile rover, equipped with a motor driver to control its 24V actuator.
Using TensorFlow-based image recognition, the harvester identifies strawberries as
"ripe" or "unripe" based on a trained dataset. The robotic arm, guided by object detection
algorithms, accurately locates and picks ripe strawberries while avoiding unripe ones.
A Raspberry Pi 4 handles processing, running a lightweight control system for real-time
detection and movement. This AI-driven approach increases harvesting efficiency, reduces
labor dependency, and minimizes fruit damage, making it ideal for modern agriculture.
The project integrates computer vision, automation, paving the way for smarter, autonomous
farming solutions.
{kind=link}
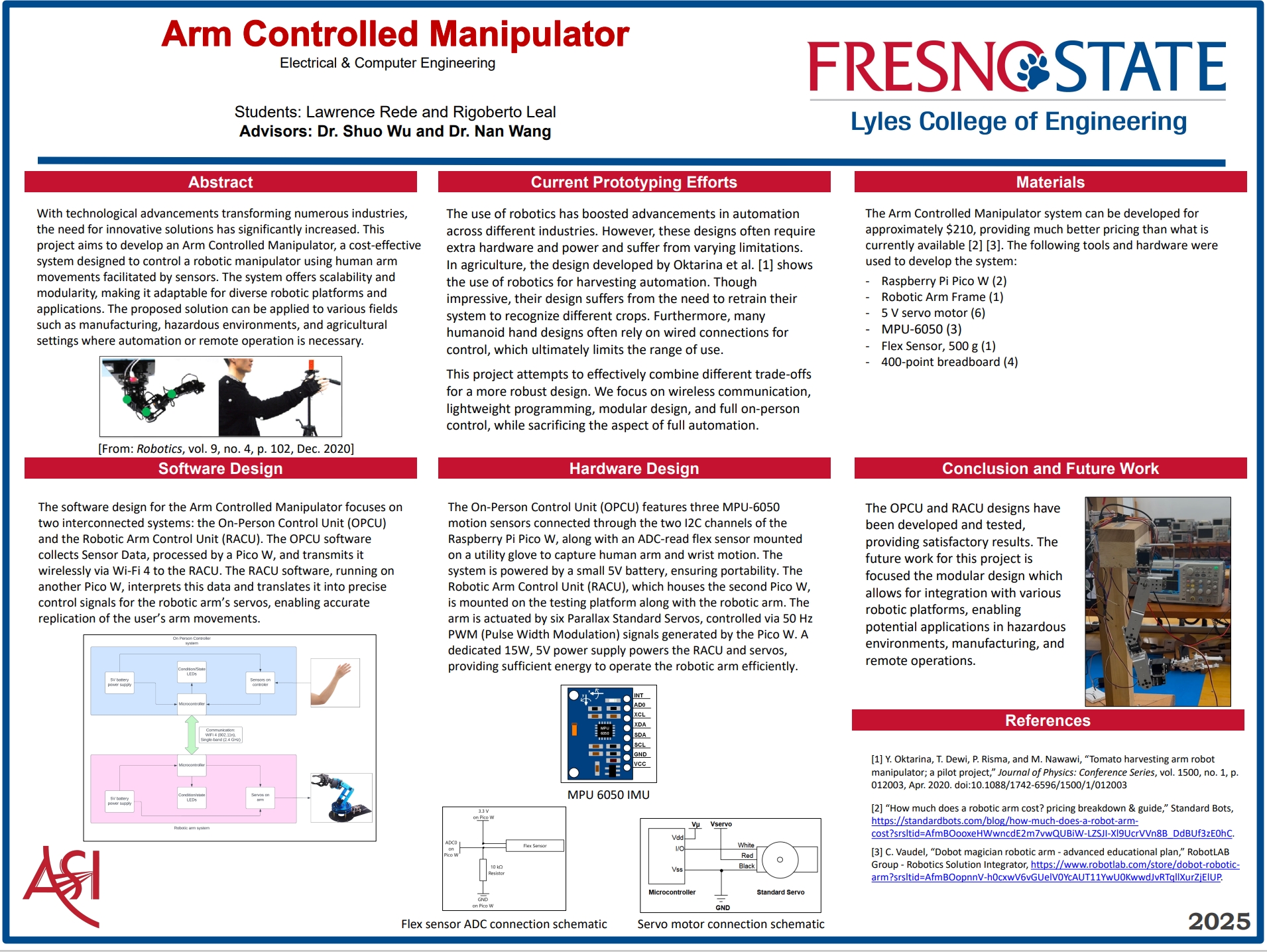
Arm Controlled Manipulator
Students: Lawrence Rede, Rigoberto Leal
Mentors/Advisors: Dr. Shuo Wu
Summary: This project presents the development of an Arm Controlled Manipulator designed to
replicate human arm movements on a robotic arm, for the application on both agricultural
and industrial use, using wireless communication between two control units. The system
comprises an on-person control unit (OPCU) and a robotic arm control unit (RACU),
both utilizing Raspberry Pi Pico W microcontrollers. The OPCU, equipped with MPU-6050
and flex sensors, captures human arm movements and transmits the data wirelessly to
the RACU. The RACU interprets this data to control the robotic arm’s joints and end-effector.
The proposed modular design allows integration with various robotic platforms, enabling
potential applications in hazardous environments, manufacturing, and remote operations.
{kind=link}
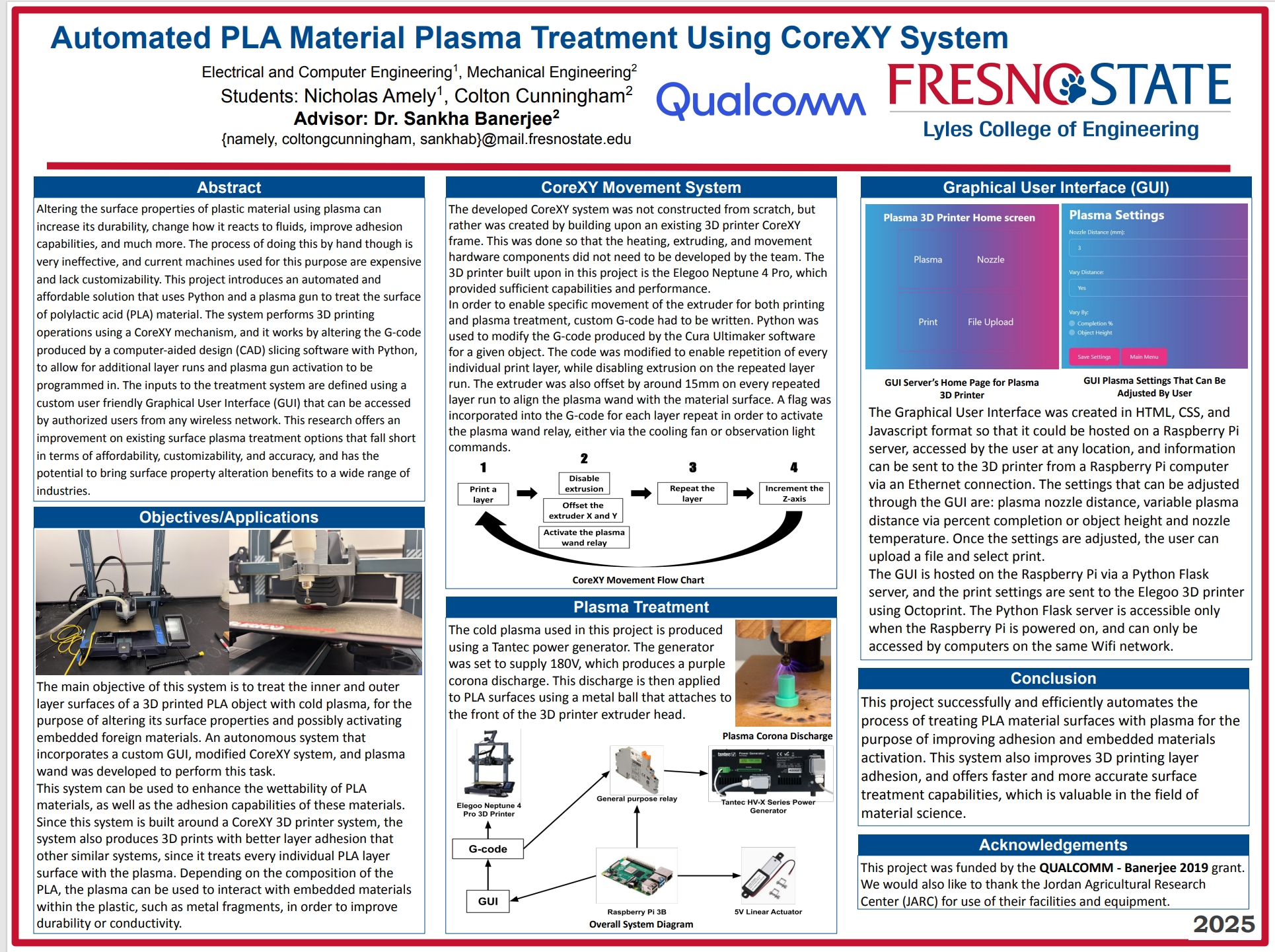
Automated PLA Material Plasma Treatment Using CoreXY System
Students: Nicholas Amely, Colton Cunningham
Mentors/Advisors: Dr. Sankha Banerjee
Sponsors: Qualcomm
Summary: Altering the surface properties of plastic material using plasma can increase its
durability, change how it reacts to fluids, improve adhesion capabilities, and much
more. The process of doing this by hand though is very ineffective, and current machines
used for this purpose are expensive and lack customizability. This project introduces
an automated and affordable solution that uses Python and a plasma gun to treat the
surface of polylactic acid (PLA) material. The system performs 3D printing operations
using a CoreXY mechanism, and it works by altering the G-code produced by a computer-aided
design (CAD) slicing software with Python, to allow for additional layer runs and
plasma gun activation to be programmed in. The inputs to the treatment system are
defined using a custom user friendly Graphical User Interface (GUI) that can be accessed
by authorized users from any wireless network. This research offers an improvement
on existing surface plasma treatment options that fall short in terms of affordability,
customizability, and accuracy, and has the potential to bring surface property alteration
benefits to a wide range of industries.
{kind=link}
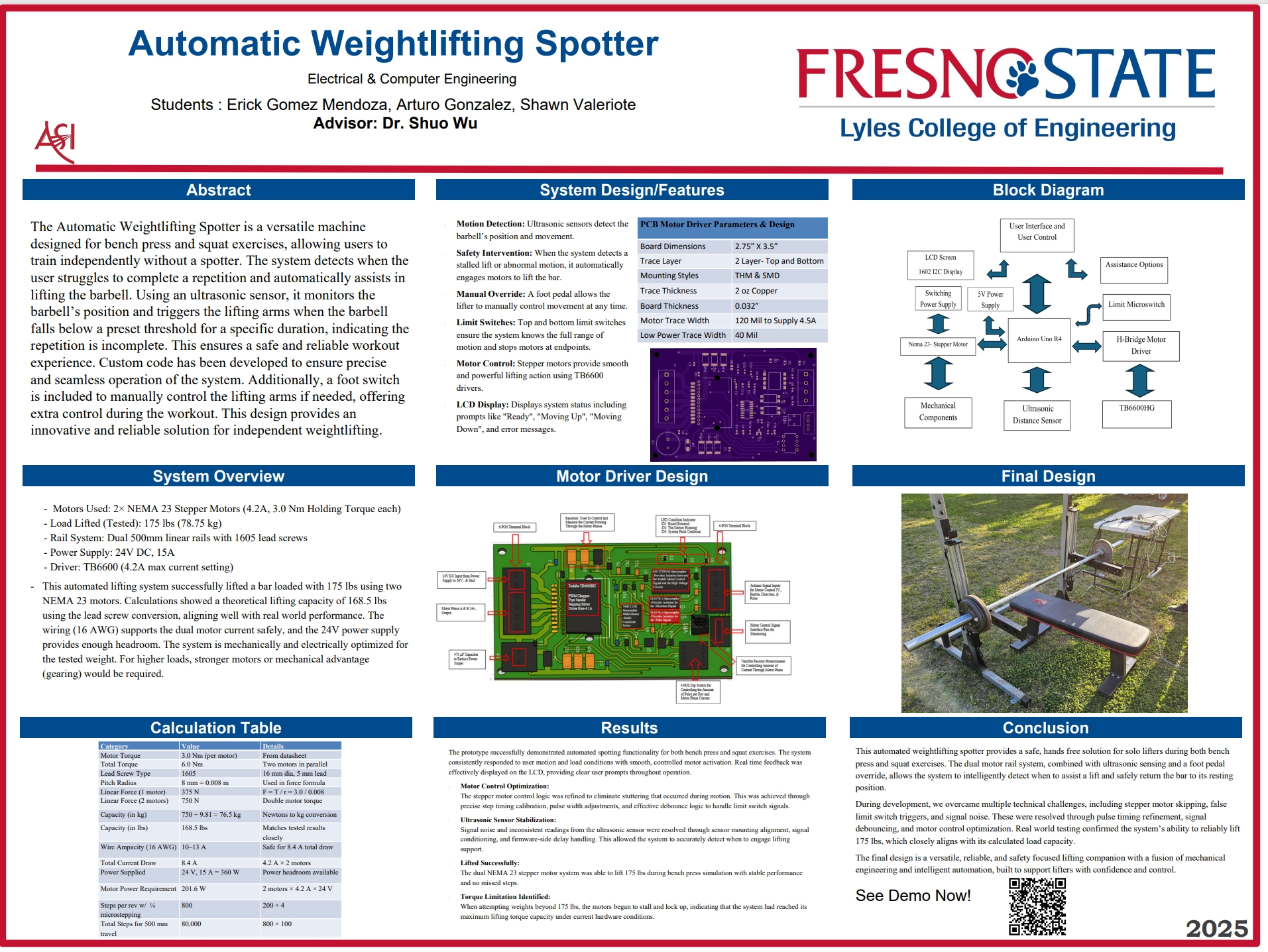
Automatic Weightlifting Spotter
Students: Erick Gomez Mendoza, Arturo Gonzalez, Shawn Valeriote
Mentors/Advisors: Dr. Shuo Wu
Summary: The Automatic Weightlifting Spotter is a versatile machine designed for bench press
and squat exercises, allowing users to train independently without a spotter. The
system detects when the user struggles to complete a repetition and automatically
assists in lifting the barbell. Using an ultrasonic sensor, it monitors the barbell’s
position and triggers the lifting arms when the barbell falls below a preset threshold
for a specific duration, indicating the repetition is incomplete. This ensures a safe
and reliable workout experience. Custom code has been developed to ensure precise
and seamless operation of the system. Additionally, a foot switch is included to manually
control the lifting arms if needed, offering extra control during the workout. This
design provides an innovative and reliable solution for independent weightlifting.
{kind=link}
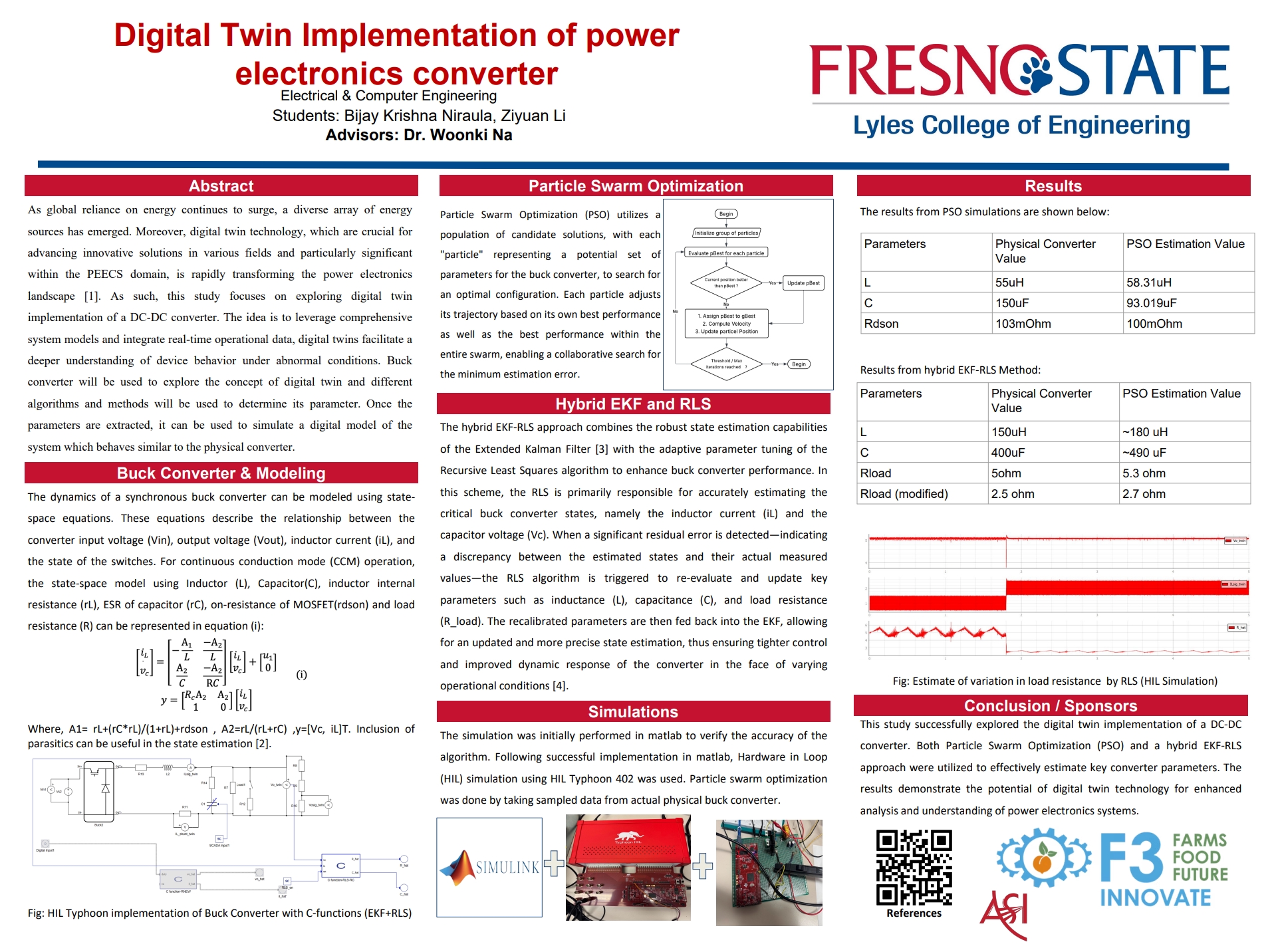
Digital Twin on a Power Converter for Agriculture Applications
Students: Bijay Niraula, Ziyuan Li
Mentors/Advisors: Dr. Woonki Na
Summary: The project involve exploring multiple control strategies for DC-DC (Sliding Mode,
Model Predictive, Pl control) and development of a functional converter. For digital
twin realization of this converter, its digital counterpart will be developed in HIL
environment (Typhoon HIL) and heuristic optimization algorithm is used to determined
parameters of the physical converter through non-invasive approach. The goal is to
use the real time simulation environment to improve accuracy and performance of digital
twin.
{kind=link}
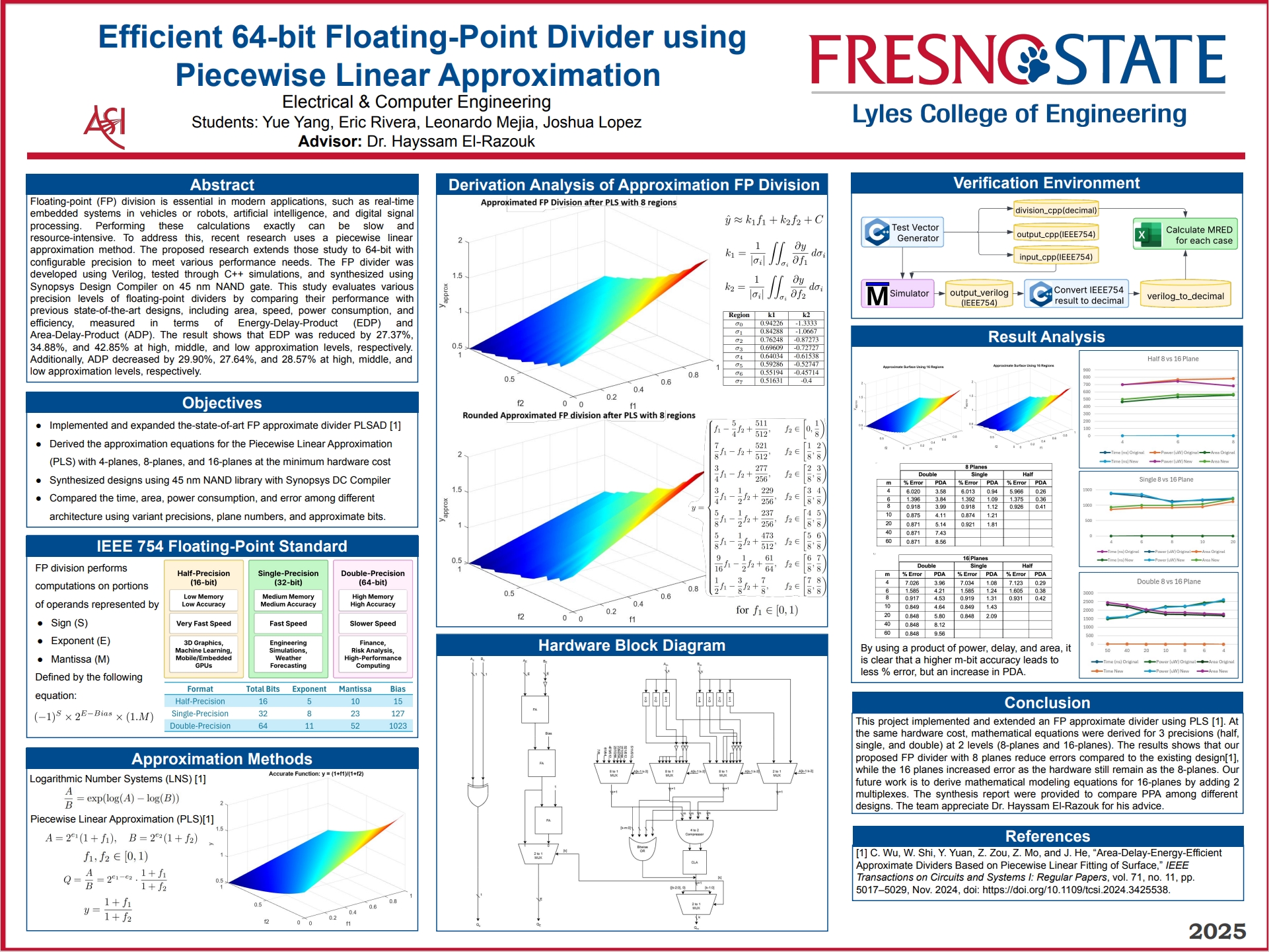
Efficient 64-bit Floating-Point Divider using Piecewise Linear Approximation
Students: Yue Yang, Eric Rivera, Leonardo Mejia, Joshua Lopez
Mentors/Advisors: Dr. Hayssam El-Razouk
Summary: Floating-point (FP) division is essential in modern applications, such as real-time
embedded systems in vehicles or robots, artificial intelligence, and digital signal
processing. Performing these calculations exactly can be slow and resource-intensive.
To address this, recent research uses a piecewise linear approximation method. The
proposed research extends those study to 64-bit with configurable precision to meet
various performance needs. The FP divider was developed using Verilog, tested through
C++ simulations, and synthesized using Synopsys Design Compiler on 45 nm NAND gate.
This study evaluates various precision levels of floating-point dividers by comparing
their performance with previous state-of-the-art designs, including area, speed, power
consumption, and efficiency, measured in terms of Energy-Delay-Product (EDP) and Area-Delay-Product
(ADP). The result shows that EDP was reduced by 27.37%, 34.88%, and 42.85% at high,
middle, and low approximation levels, respectively. Additionally, ADP decreased by
29.90%, 27.64%, and 28.57% at high, middle, and low approximation levels, respectively.
{kind=link}
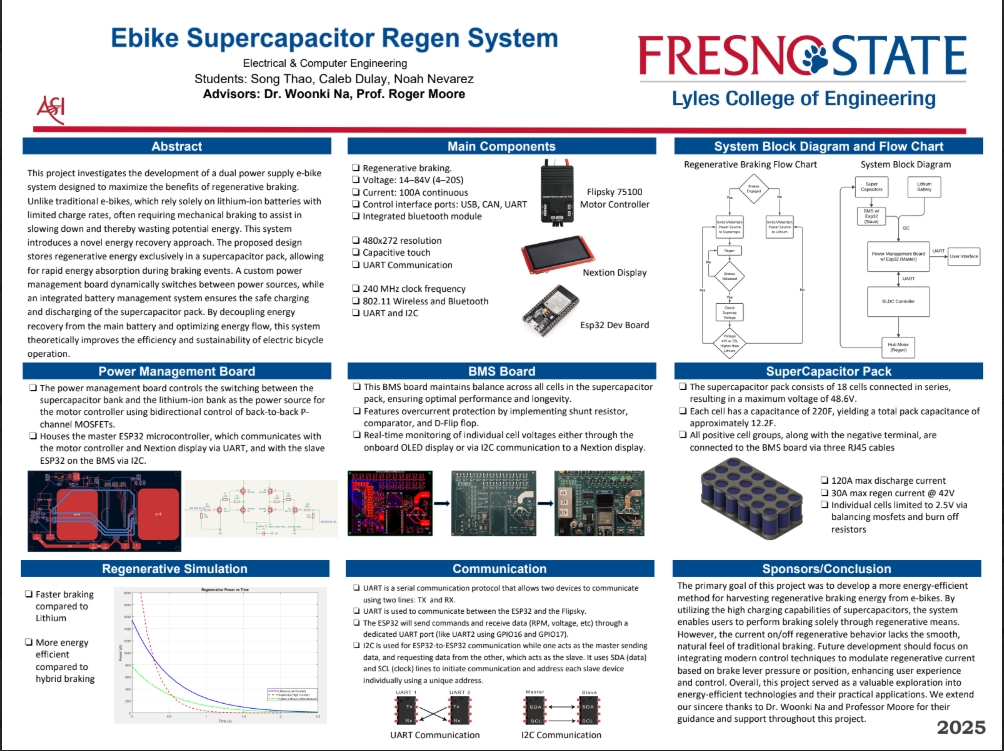
Electric Bike Supercapacitor Regeneration System
Students: Caleb Dulay, Song Thao, Noah Nevarez
Mentors/Advisors: Dr. Woonki Na
Summary: The Electric Bike Supercapacitor Regen System project aims to develop an innovative
system which enhances the efficiency of electric bicycles through regenerative braking.
This system will enable electric bikes to recover and store kinetic energy during
braking through the use of hybrid supercapacitors. The implementation of more energy
dense hybrid supercapacitors will not only reduce energy consumption but also improve
the performance of electric bikes. The key components of this project include a dual
power source regenerative controller and hybrid energy storage system. The controller
should be able to utilize the supercapacitor’s energy storage to reduce starting currents
and voltage sag during acceleration. The energy storage system will consist of hybrid
supercapacitors in addition to traditional lithium ion battery cells in a switched-parallel
connection where regeneration will only be sent to the supercapacitors.
{kind=link}
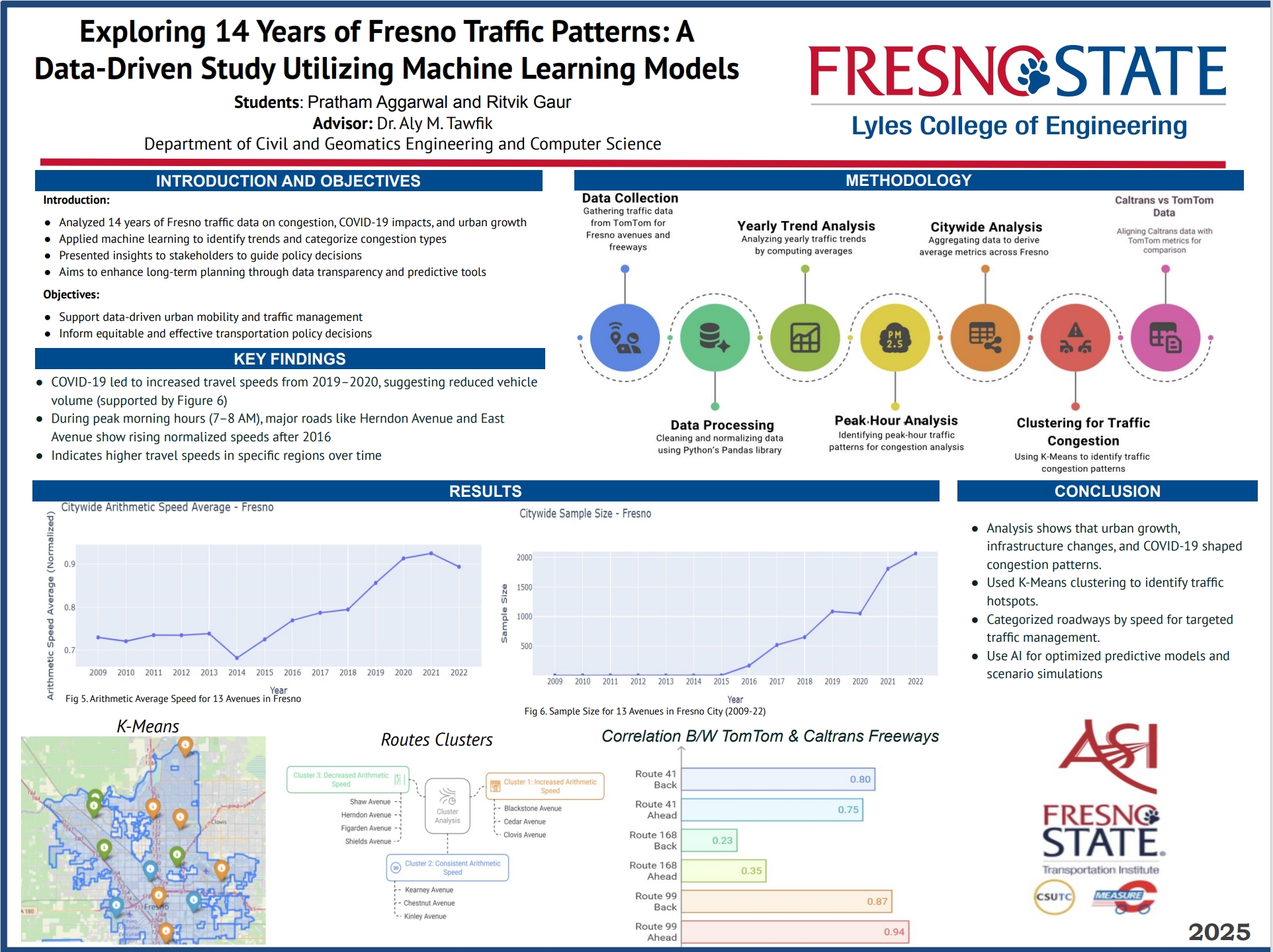
Exploring 14 Years of Fresno Traffic Patterns: A Data-Driven Study Utilizing Machine
Learning Models
Students: Pratham Aggarwal, Ritvik Gaur
Mentors/Advisors: Dr. Aly Tawfik
Summary: This study delivers a comprehensive 14-year analysis (2009-2022) of traffic patterns
in Fresno County, using extensive datasets from TomTom and Caltrans. We examine critical
trends such as congestion build-up, peak-hour bottlenecks, and variations in traffic
speed dynamics along the county’s major routes and urban corridors. By leveraging
advanced machine learning (ML) and artificial intelligence (AI), we extract key insights
from this data and provide accurate, data-driven predictions for future traffic behavior
and congestion trends.A focal point of this research is the comparison of pre- and
post-COVID-19 traffic patterns. Our analysis reveals significant shifts in commuter
behavior, road usage, and overall congestion levels during and after the pandemic.
These changes are visualized through detailed graphical representations, highlighting
the long-term impacts on regional traffic flows. Additionally, our AI model predicts
future congestion hotspots and provides actionable recommendations to help mitigate
traffic challenges in the coming years. The insights from this study equip transportation
planners and policymakers with the tools needed to implement adaptive traffic management
systems and design resilient infrastructure. By combining historical data analysis
with AI-driven forecasts, this research offers a strategic framework for ensuring
Fresno County's transportation network is sustainable and future-ready.
{kind=link}
High-Performance Matrix Multiplication: A 16-Core Parallel Processor Design for Accelerated
Computing
Students: Yue Yang, Lue Her, Anthony Nichols Jr.
Mentors/Advisors: Dr. Aaron Stillmaker
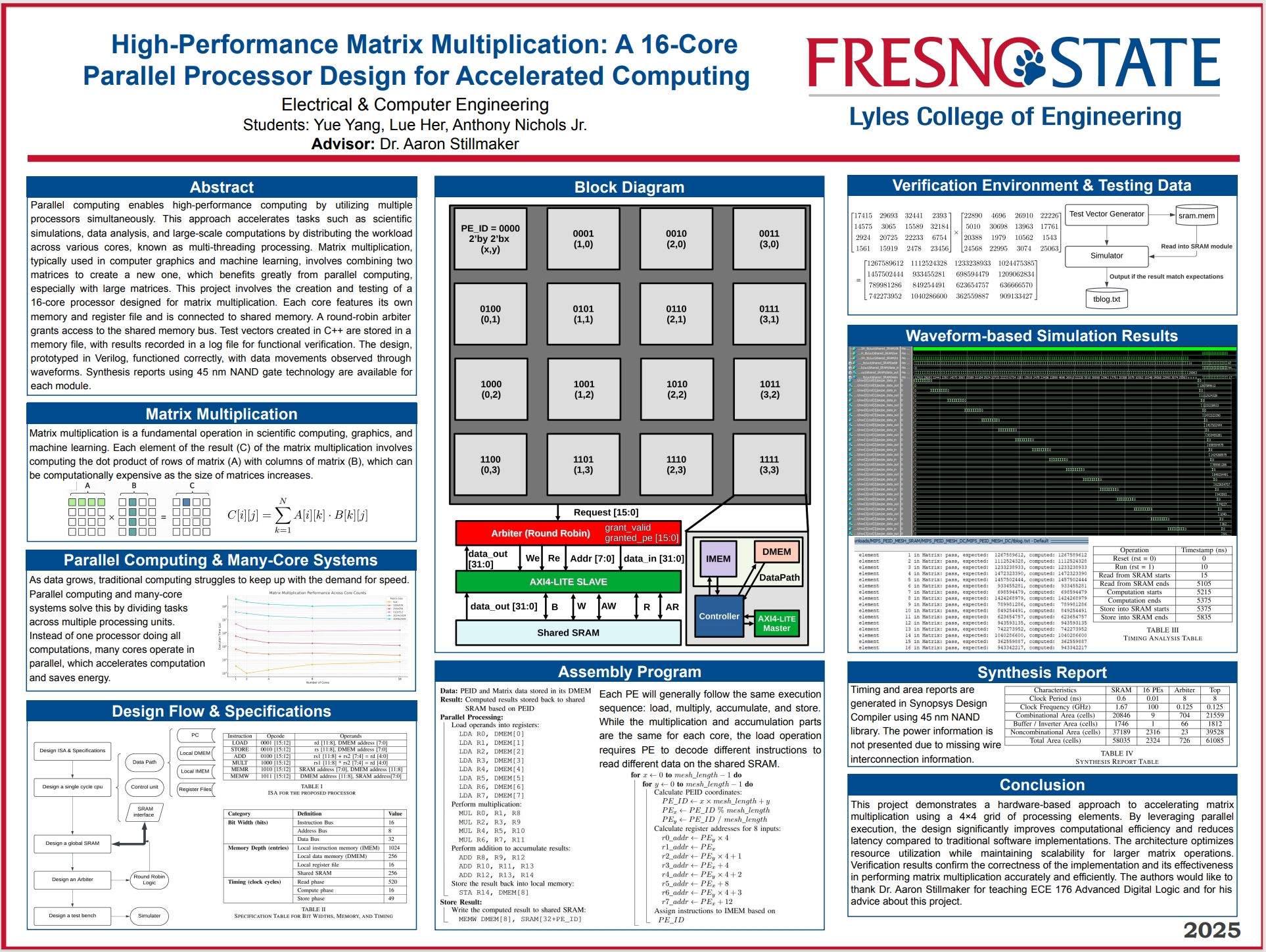
Summary: Parallel computing enables high-performance computing by utilizing multiple processors
simultaneously. This approach accelerates tasks such as scientific simulations, data
analysis, and large-scale computations by distributing the workload across various
cores, known as multi-threading processing. Matrix multiplication, typically used
in computer graphics and machine learning, involves combining two matrices to create
a new one, which benefits greatly from parallel computing, especially with large matrices.
This project involves the creation and testing of a 16-core processor designed for
matrix multiplication. Each core features its own memory and register file and is
connected to shared memory. A round-robin arbiter grants access to the shared memory
bus. Test vectors created in C++ are stored in a memory file, with results recorded
in a log file for functional verification. The design, prototyped in Verilog, functioned
correctly, with data movements observed through waveforms. Synthesis reports using
45 nm NAND gate technology are available for each module.
{kind=link}
HomeBoard
Students: Drake Sheela, Adam Garabedian
Mentors/Advisors: Roger Moore
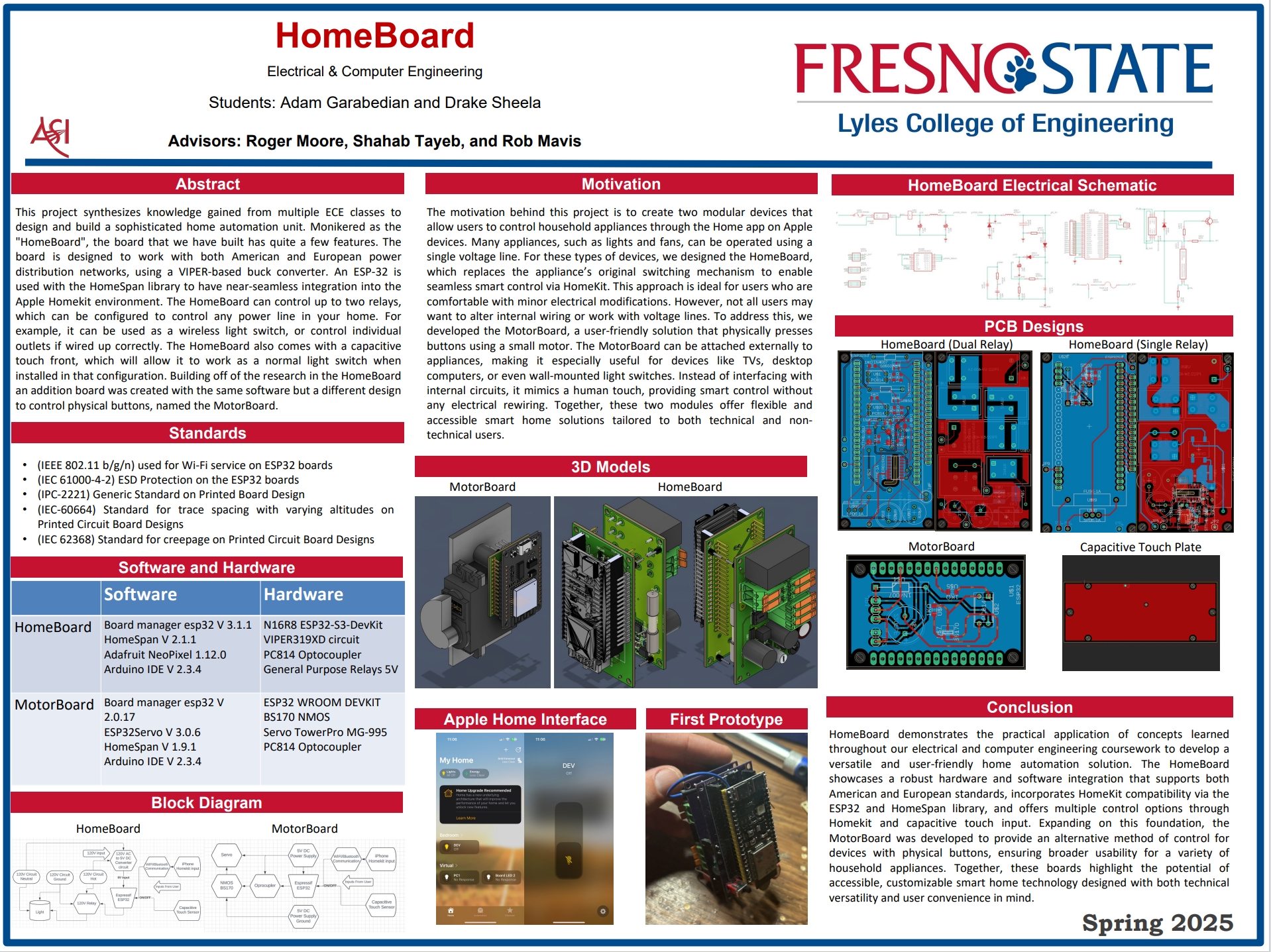
Summary: This project synthesizes knowledge gained from multiple ECE classes to design and
build a sophisticated home automation unit. Monikered as the "HomeBoard", the board
that we have built has quite a few features. The board is designed to work with both
American and European power distribution networks, using a VIPER-based buck converter.
An ESP-32 is used with the HomeSpan library to have near-seamless integration into
the Apple Home environment. The HomeBoard can control two relays, which can be configured
to control any power line in your home. For example, it can be used as a wireless
light switch, or can control individual outlets if wired up correctly. The HomeBoard
also comes with a capacitive touch front, which will allow it to work as a normal
light switch when installed in that configuration.
{kind=link}
MetavoltVR: A Student Developed Virtual Reality Circuit Building Application
Students: Nicholas Amely, Jesus Leyva
Mentors/Advisors: Dr. Wei Wu
Sponsors: National Science Foundation Project Grant #2126723
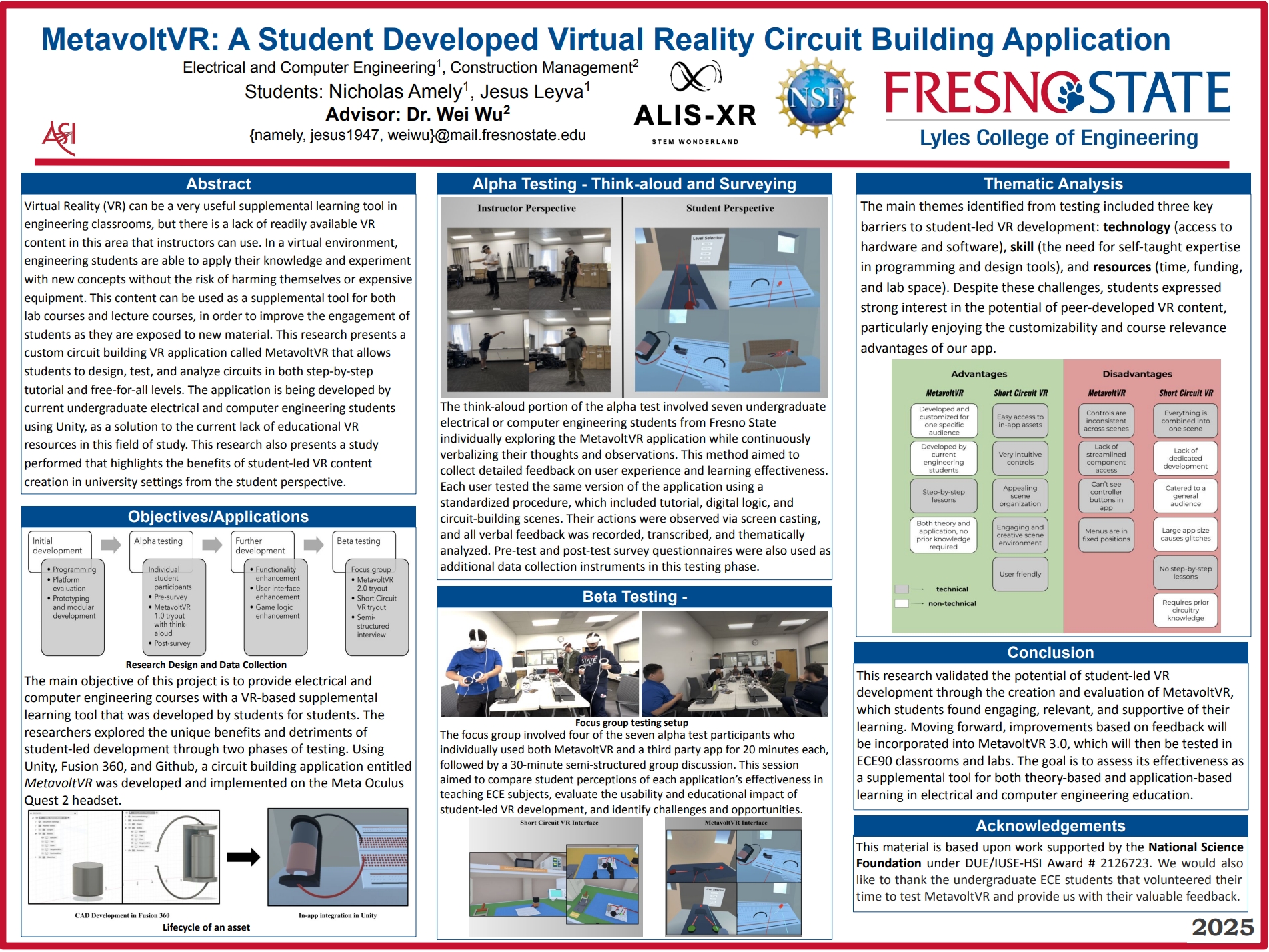
Summary: Virtual Reality (VR) can be a very useful supplemental learning tool in engineering
classrooms, but there is a lack of readily available VR content in this area that
instructors can use. In a virtual environment, engineering students are able to apply
their knowledge and experiment with new concepts without the risk of harming themselves
or expensive equipment. This content can be used as a supplemental tool for both lab
courses and lecture courses, in order to improve the engagement of students as they
are exposed to new material. This research presents a custom circuit building VR application
called MetavoltVR that allows students to design, test, and analyze circuits in both
step-by-step tutorial and free-for-all levels. The application is being developed
by current undergraduate electrical and computer engineering students using Unity,
as a solution to the current lack of educational VR resources in this field of study.
This research also presents a study performed that highlights the benefits of student-led
VR content creation in university settings from the student perspective.
{kind=link}
ML-Enabled Glasses for Safety and Smart Home Interaction
Students: Dallas Loera, Leonardo Mejia, Joshua Lopez
Mentors/Advisors: Dr. Shahab Tayeb
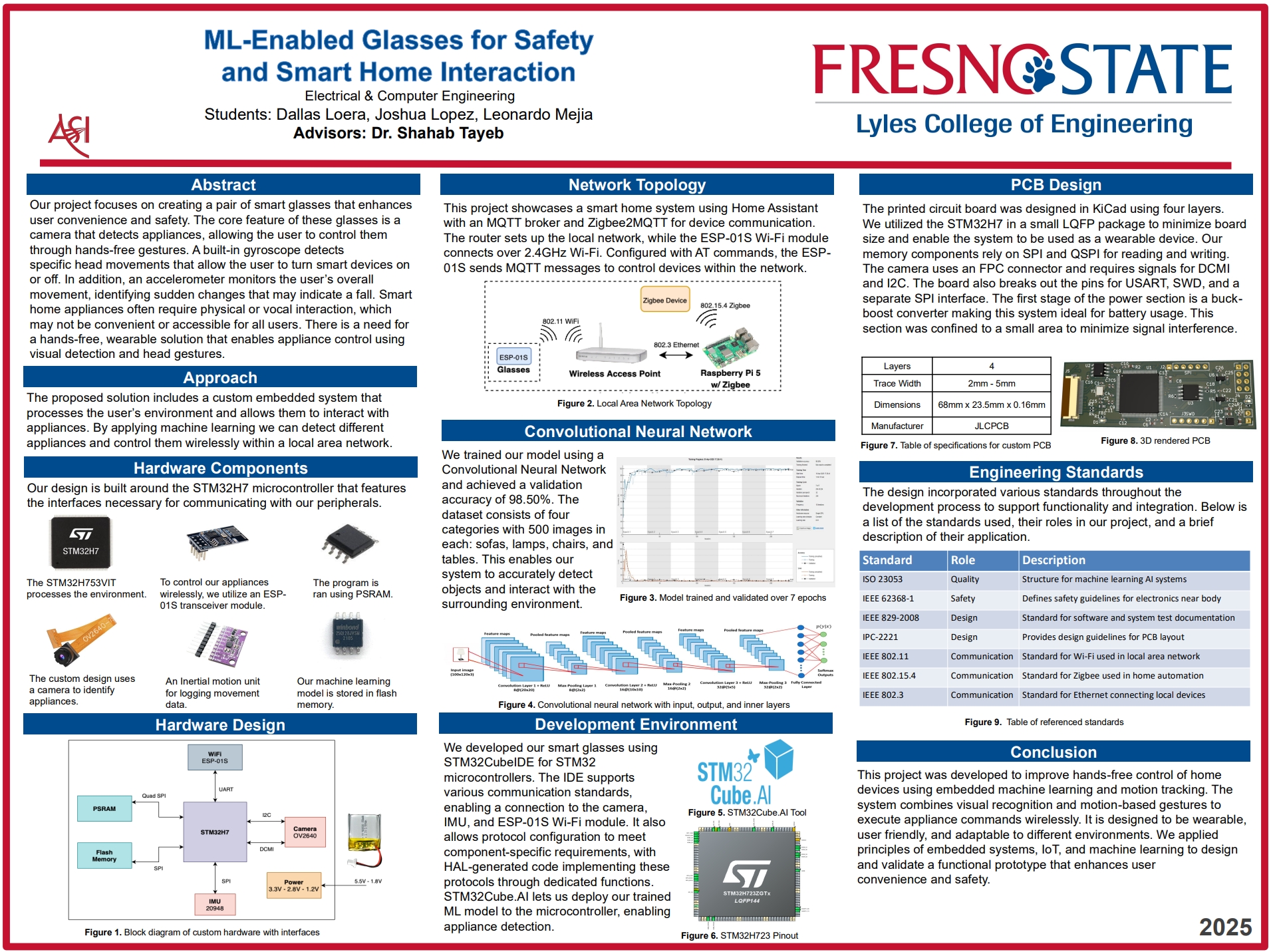
Summary: The development of smart technologies has revolutionized the way we interact with
everyday devices. Following with this trend, our project focuses on creating a pair
of smart glasses that enhance user convenience and safety. The core feature of theses
glasses is a micro camera that detects hand gestures, enabling the user to control
home appliances through touch free commands. Additionally, the glasses will be equipped
with an accelerometer to monitor the user’s movements, specifically detecting any
abrupt or serious movements indicating of a fall. This dual functionality integrates
convenience and safety into a wearable form, providing an innovation solution for
smart home control and user well-being.Our project aims to develop a pair of smart
glasses that leverages advanced sensor technology to enhance user interaction with
their environment. The glasses will feature a micro camera for gesture recognition
allowing users to control home appliances. This project is designed to offer a blend
of convenience and safety, catering to users looking for innovative solutions in home
automation and personal safety.
{kind=link}
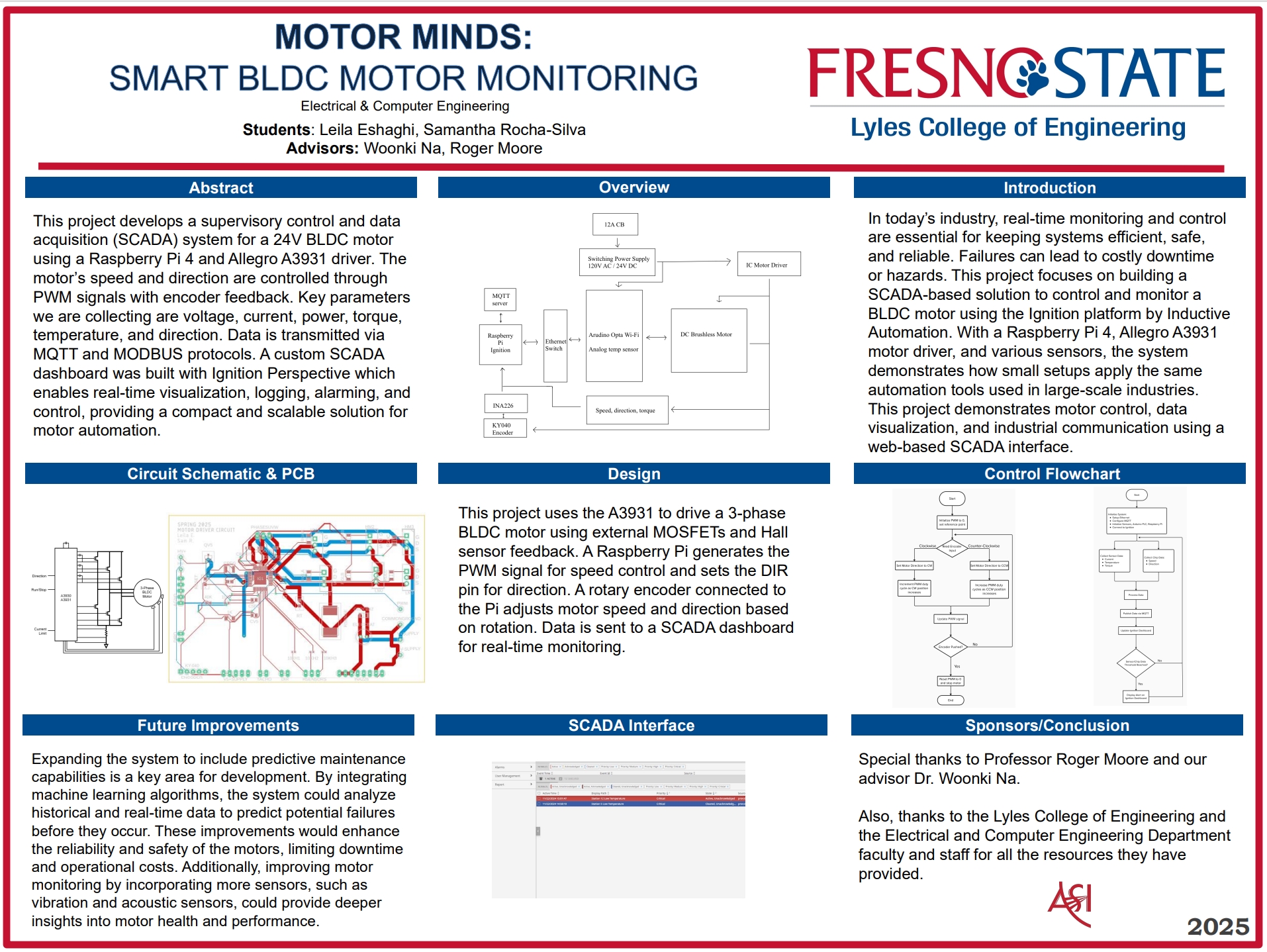
Motor Minds: Smart BLDC Motor Monitoring
Students: Samantha Rocha Silva, Leila Eshaghi
Mentors/Advisors: Dr. Woonki Na
Summary: The Smart DC Motor Control and Protection System project aims to design and implement
an advanced, integrated system that enhances the control, efficiency, and safety of
DC motors used in industrial settings. This system will offer real-time monitoring
and automated controls through a user-friendly dashboard and protection mechanisms.
The dashboard UI will receive immediate feedback and alerts on the motor's performance,
enabling proactive maintenance and operational efficiency. The system ensures reliable
motor operation by incorporating precise speed and direction control. A Raspberry
Pi-based interface with an Allegro A3930 motor driver and encoder-based control will
provide seamless user interaction. Additionally, Hall-effect sensors will enhance
motor feedback, improving stability and performance. This smart system is designed
for industrial automation, offering efficiency, reliability, and safety in motor-driven
applications.
{kind=link}
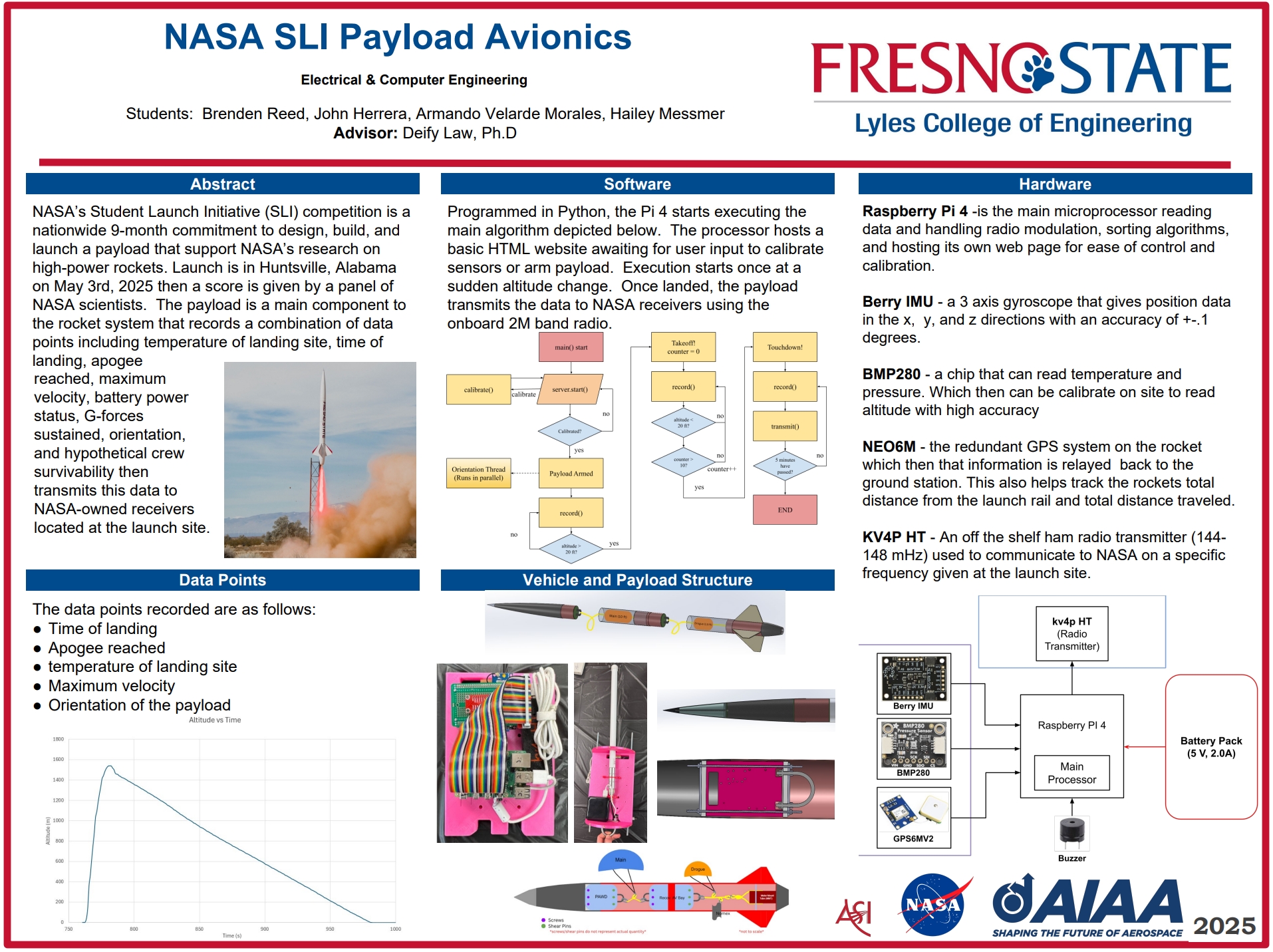
NASA SLI Payload Avionics
Students: Brenden Reed, John Herrera
Mentors/Advisors: Dr. Deify Law
Sponsors: NASA
Summary: NASA’s Student Launch Initiate (SLI) competition is a nationwide 9-month commitment
to design, build, and launch a payload that support NASA’s research on high-power
rockets. Universities from all over the country will launch their rocket system in
Huntsville, Alabama on May 3rd, 2025, then given a score by a panel of NASA scientists.
The payload is a main component to the rocket system that records a combination of
data points including temperature of landing site, time of landing, apogee reached,
maximum velocity, battery power status, G-forces sustained, orientation, and hypothetical
crew survivability then transmits this data to NASA-owned receivers located at the
launch site.
{kind=link}
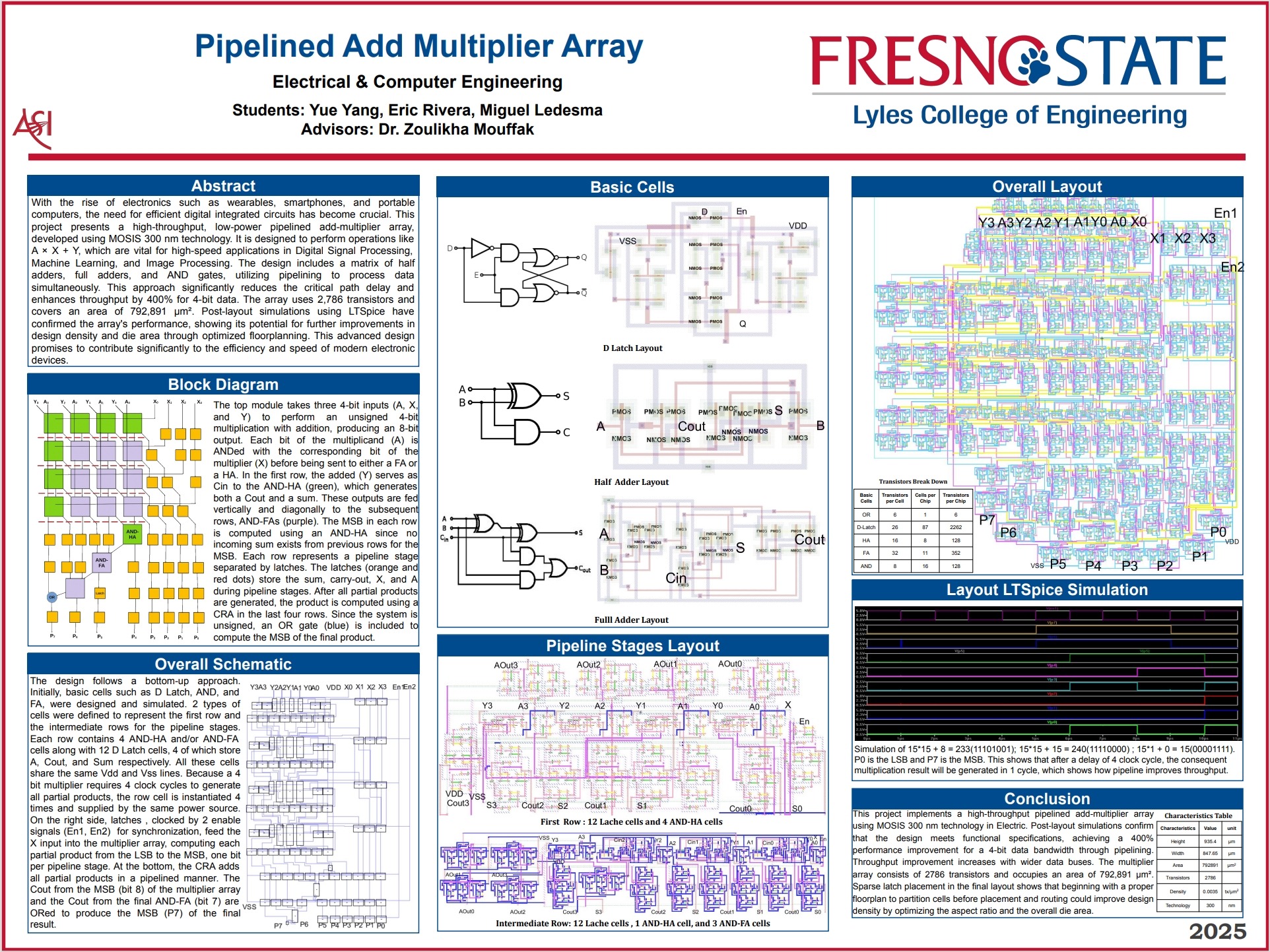
Pipelined Add Multiplier Array
Students: Yue Yang, Eric Rivera, Miguel Ledesma
Mentors/Advisors: Dr. Zoulikha Mouffak
Summary: With the rise of electronics such as wearables, smartphones, and portable computers,
the need for efficient digital integrated circuits has become crucial. This project
presents a high-throughput, low-power pipelined add-multiplier array, developed using
MOSIS 300 nm technology. It is designed to perform operations like A × X + Y, which
are vital for high-speed applications in Digital Signal Processing, Machine Learning,
and Image Processing. The design includes a matrix of half adders, full adders, and
AND gates, utilizing pipelining to process data simultaneously. This approach significantly
reduces the critical path delay and enhances throughput by 400% for 4-bit data. The
array uses 2,786 transistors and covers an area of 792,891 µm². Post-layout simulations
using LTSpice have confirmed the array's performance, showing its potential for further
improvements in design density and die area through optimized floorplanning. This
advanced design promises to contribute significantly to the efficiency and speed of
modern electronic devices.
{kind=link}
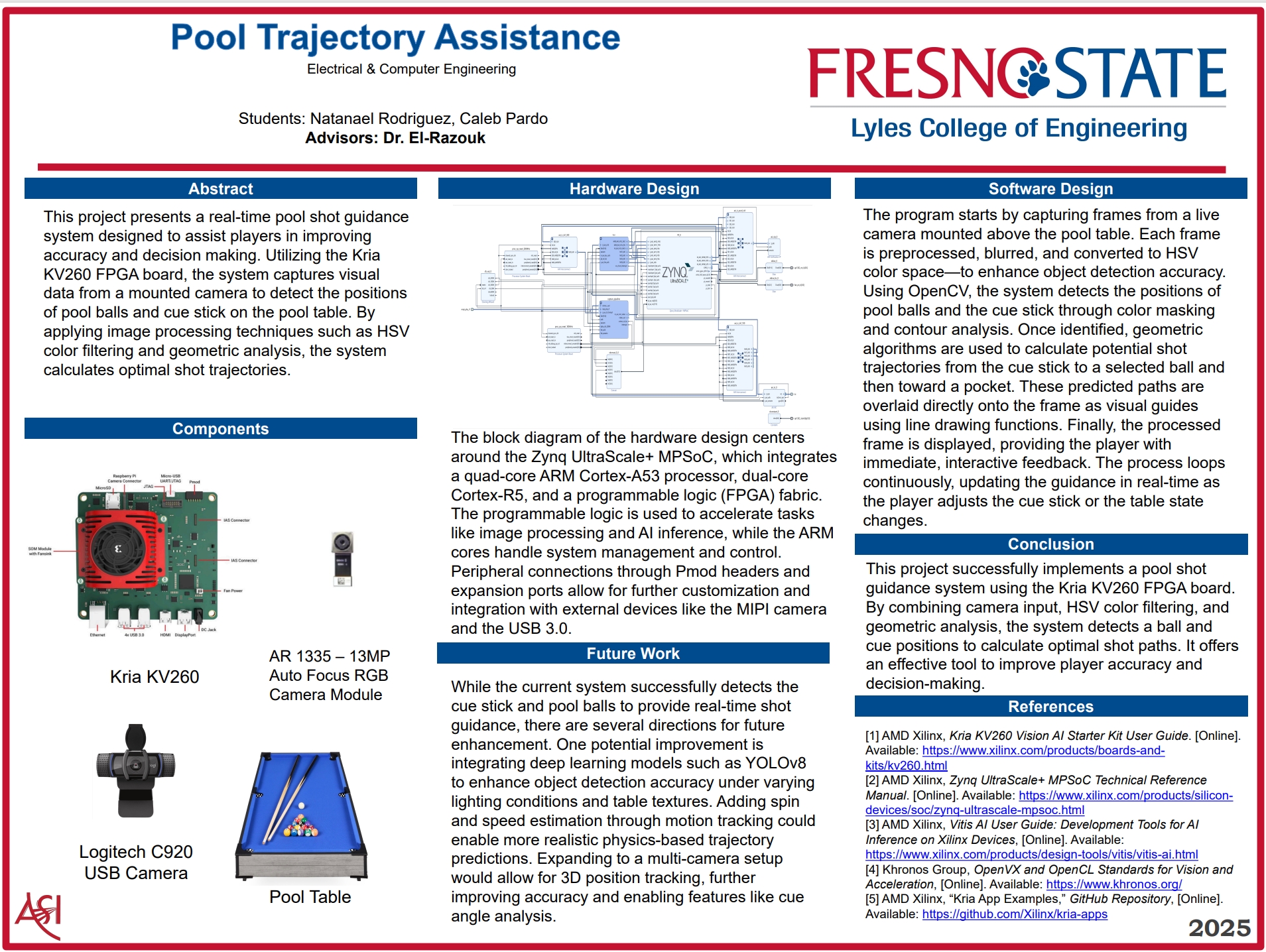
Pool Trajectory Assistance
Students: Natanael Rodriguez & Caleb Pardo
Mentors/Advisors: Dr. Hayssam El-Razouk
Summary: The Pool Trajectory Assistance System is a real-time, AI-powered tool designed to
enhance player accuracy by analyzing the trajectory of the cue ball after impact and
displaying projected path vectors on the pool table. Utilizing the FPGA technology,
specifically the Kria KV260 known for its high-performance computing capabilities
and efficient real-time processing, with a connected camera, the system captures live
video feed, detecting the positions of the cue ball and cue stick to calculate and
display precise trajectory vectors directly on the table surface via a projector.
This allows players to visualize the ball's future paths and make more informed and
precise shots.
{kind=link}
Reliability of Static Random Access Memory Bit Cells at Varying Temperatures
Students: Eric River
Mentors/Advisors: Dr. Hayssam El-Razouk
Sponsors: F3 Innovate, Edison International
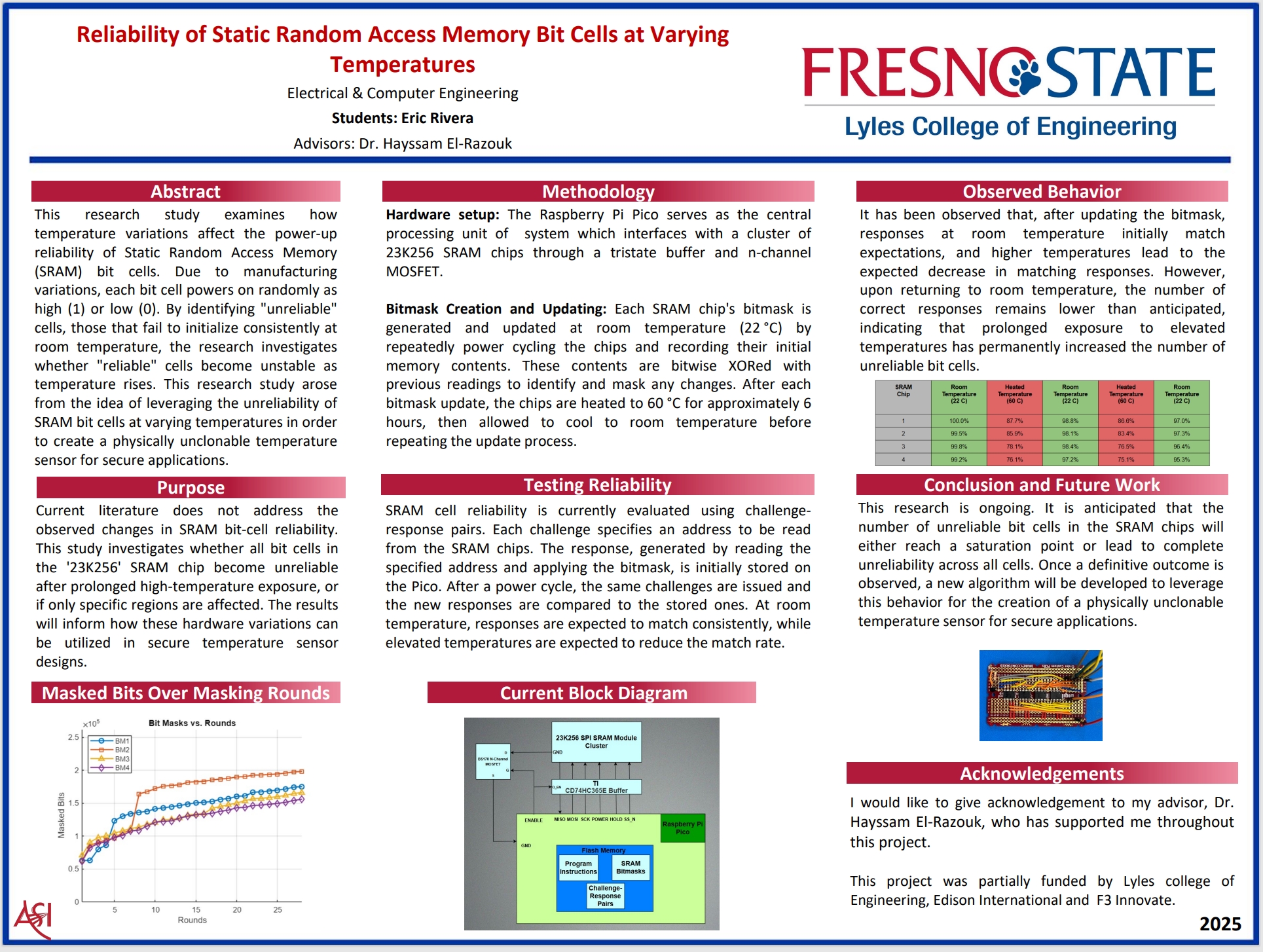
Summary: This study examines how temperature variations affect the power-up reliability of
Static Random Access Memory (SRAM) bit cells. Due to manufacturing variations, each
bit cell powers on randomly as high or low. By identifying "unreliable" cells—those
that fail to initialize consistently at room temperature—the research investigates
whether "reliable" cells become unstable as temperature rises. It also explores whether
prolonged high-temperature exposure causes permanent changes in initialization behavior.
Python scripts automate power cycling and data collection using a Raspberry Pi Pico
interfaced with external 256 KB SRAM chips. Results show that previously "reliable"
bit cells become "unreliable" at higher temperatures, with instability increasing
proportionally. Additionally, extended high-temperature exposure leads to permanent
reliability degradation in some cells. These findings highlight temperature-induced
effects on SRAM power-up behavior, which could impact applications requiring predictable
initialization states.
{kind=link}
Rough Terrain Electric Wheelchair
Students: Caleb Fisk, Christian Martinez, Octavio Munoz-Herrera
Mentors/Advisors: Dr. Wooki Na, Roger Moore
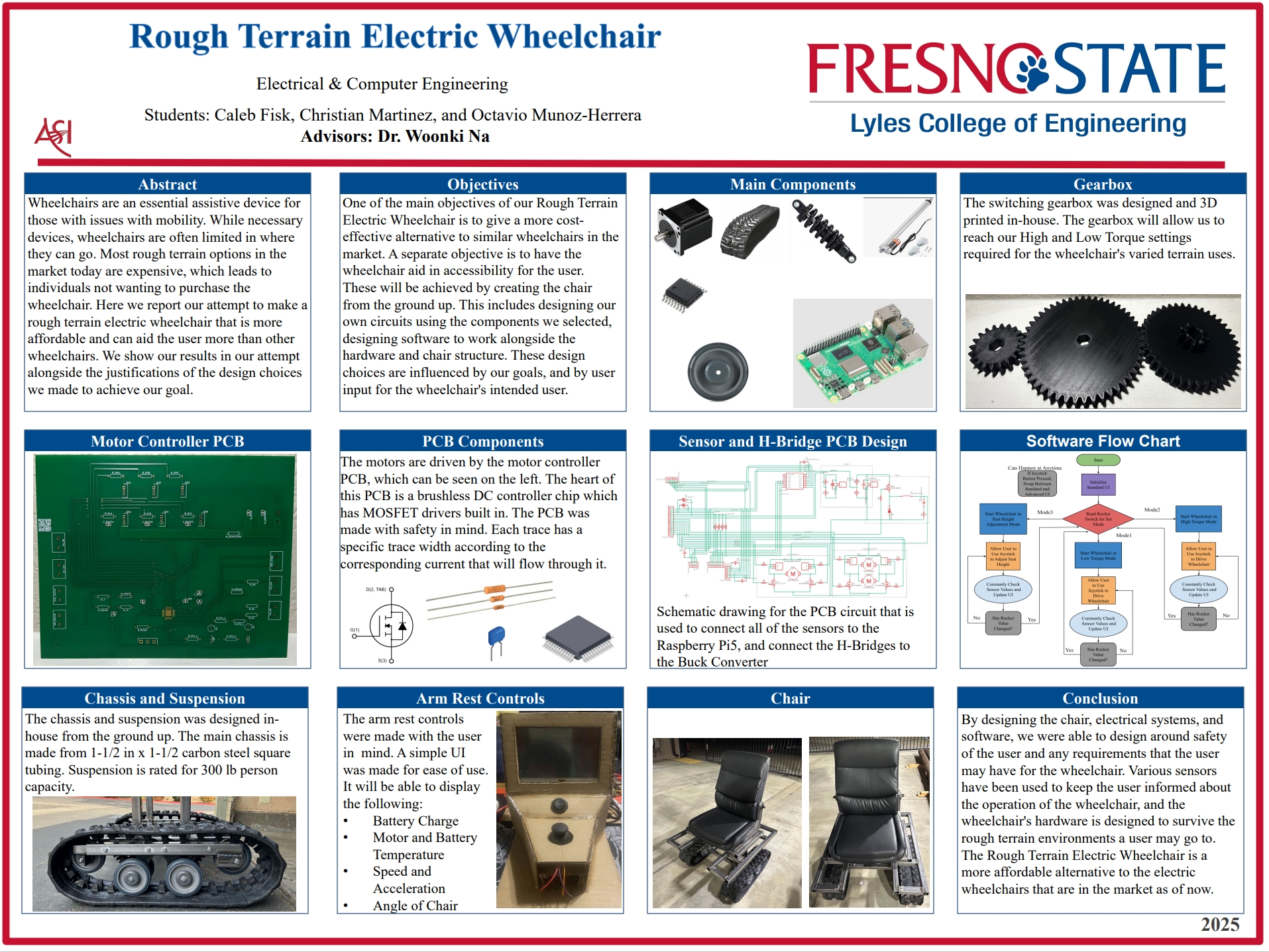
Summary: This project is called Rough Terrain Electric Wheelchair(RTEW). This chair will will
be built out of aluminum. It will be driven by 2 brushless DC motors. The DC motors
will be driving the 2 rubber tracks, one per side. It will be able to drive in most
terrains, included but not limited to sand, gravel, pavement, and uneven terrain.
The weight limit for a person to drive will be 300 lb. The seat will be height adjustable.
This will make it easier for a person to transfer from one seat to the RTEW. It will
have a high and low torque mode. There will also be different types of sensors to
monitor specific data, such as speed, temperature, and battery life, etc. Safety features
are included in the design.
{kind=link}
Sensor Telemetry System via Radio Frequency
Students: Raymundo Berber-Lopez, Armando Velarde Morales, Zachary D Wyatt, Roger Moore, Tristan
Moran
Mentors/Advisors: Dr. Roger Moore
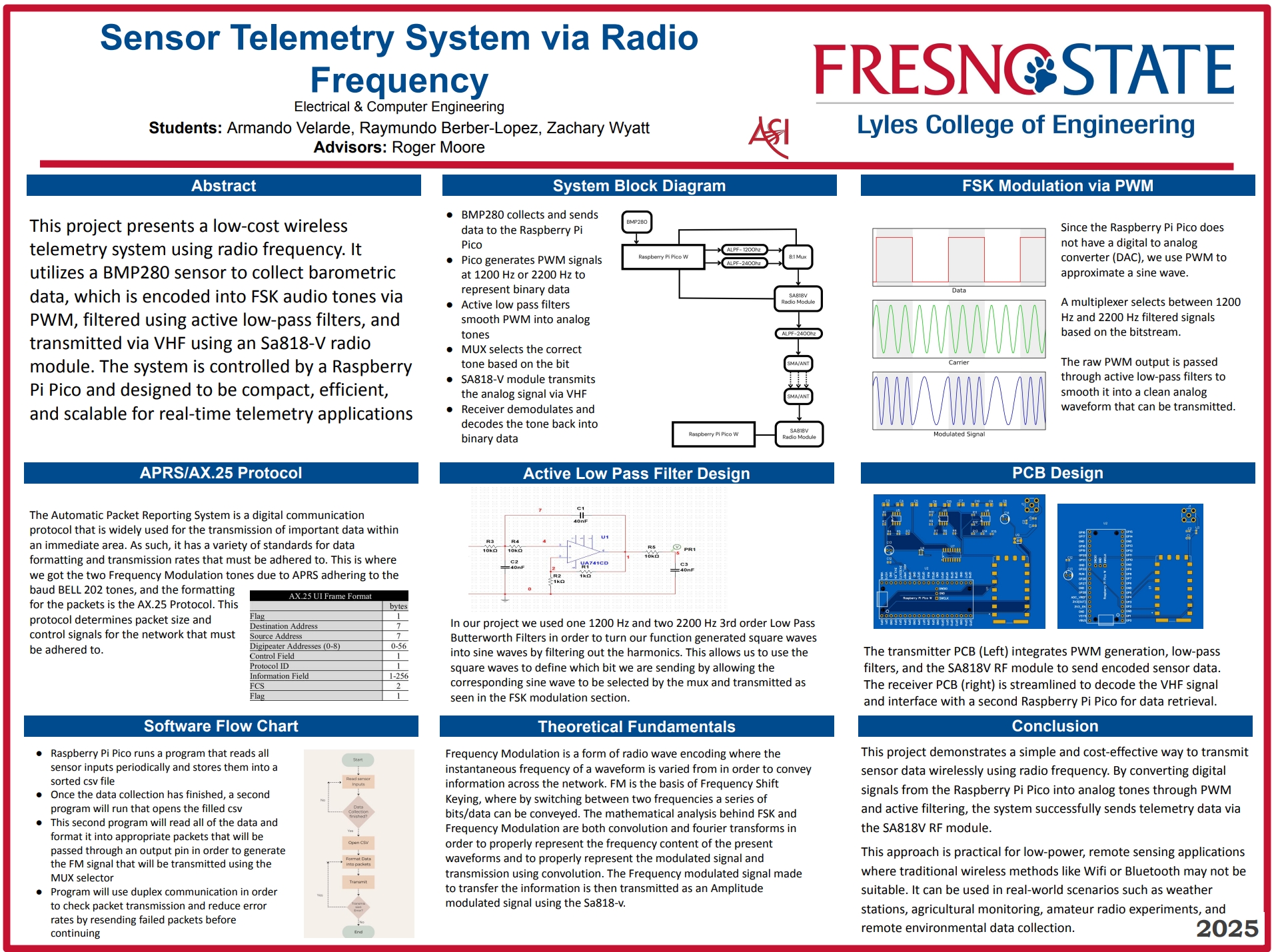
Summary: The telemetry system is a series of sensors that track a rocket’s altitude, velocity,
gps, temperature, etc... during its flight. Then upon landing it will send this data
via packets on a radio frequency. The project will attempt to design and fabricate
an embedded system for the telemetry. This system will use a Raspberry Pi Pico as
the base microprocessor for data storage and manipulation in preparation for the data
transmission after the rocket has landed. Due to the system only transmitting data
over radio once it has landed it is classified as an automated packet reporting system.
Using software-defined radios (SDRs), radio transmitters, and GNU Radio, we will implement
and test the operation of the system before designing and fabricating a custom pcb
for the embedded system.
{kind=link}
Uninterrupted Power Supply (UPS) with Battery and Supercapacitor Integration
Students: Mark Baeza, Alonso Vazquez
Mentors/Advisors: Dr. Woonki Na
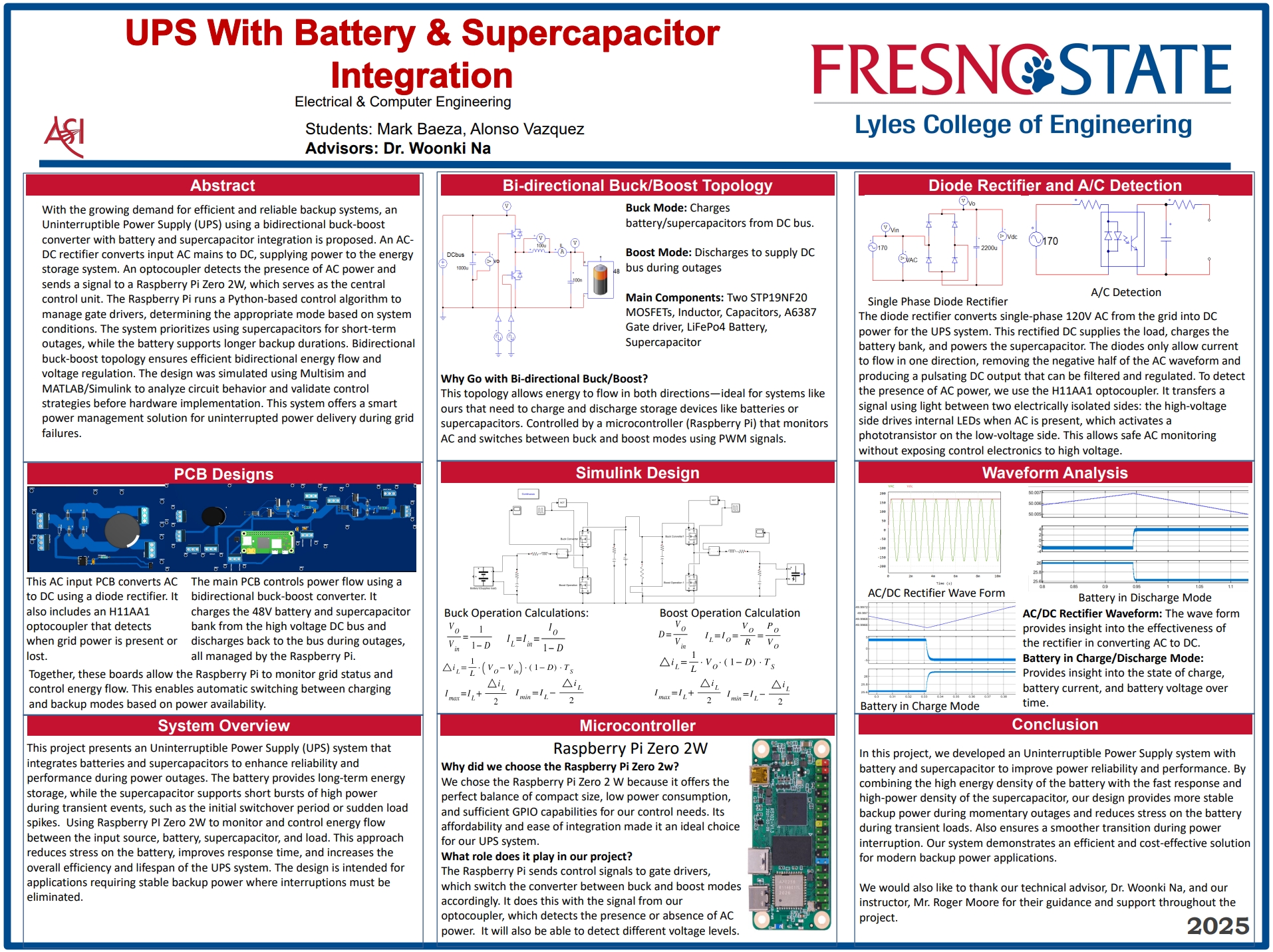
Summary: Our project focuses on creating an Uninterrupted Power Supply (UPS) that combines
supercapacitors and batteries in order to provide dependable backup power. Our system
makes use of a bidirectional buck-boost converter to effectively control power flow
and enable smooth battery and supercapacitor charging and discharging. The Supercapacitors
will respond instantly providing the power needed and then the battery guarantees
prolonged backup power during a power outage. By managing abrupt changes in load,
this hybrid technique improves power stability, lowers battery strain, and increases
energy efficiency. By maintaining the correct voltage levels, the system ensures uninterrupted
power delivery to the connected devices. This UPS is designed for applications requiring
a reliable power source, such as small-scale emergency backup systems.
{kind=link}
A Scalable Water Energy Harvesting System Design, Prototyping and Testing
Students: Hailey Messmer, Molly Taggard, David Garcia-Rodriguez, Chase Pafford, Jack Hodgson,
Christian Castro, Isaiah Altstatt, Michael, Abraham Casanova, Carlos Penaloza, Parshwa
Khanne, Bryce Means, Lauren Main, Ariana Rajabi, Diego Teran, Emilio Martinez, Pablo
Mendoza, Alexis Valencia
Mentors/Advisors: Dr. Yuanyuan Xie
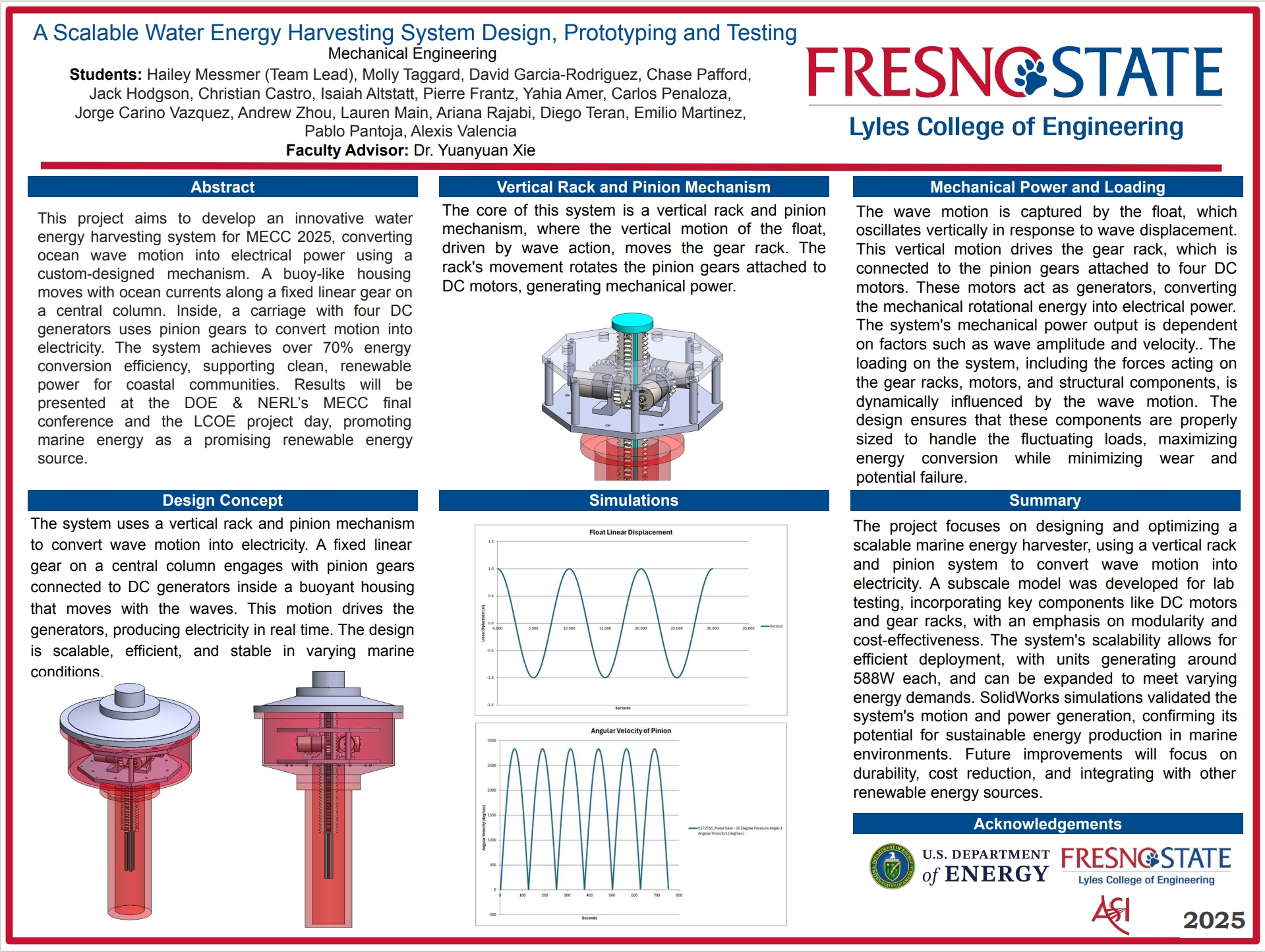
Summary: This project seeks to develop an innovative water energy harvesting system for the
MECC 2025. This marine energy harvesting system focuses on converting ocean wave motion
into electrical power using a custom-designed mechanism. The system comprises four
primary subassemblies: gear racks, a carriage, and a float, integrated within a T-slotted
frame. The gear racks capture the vertical motion of waves, transferring energy to
the motors through a pinion-gear mechanism. The project’s outcomes include a system
design with over 70% energy conversion efficiency, contributing to cleaner, renewable
power for coastal communities. Presentations will be made at the DOE’s water power
technology conference and the LCOE project day event, advancing the development of
marine energy as a reliable, renewable energy source.
{kind=link}
Accessibility: Affordable Prosthetic Arms
Students: Nicolas Macias, Chaeson Sears II, Ethan Fernandez
Mentors/Advisors: Dr. The Nguyen
Sponsors: Rise and LSAMP
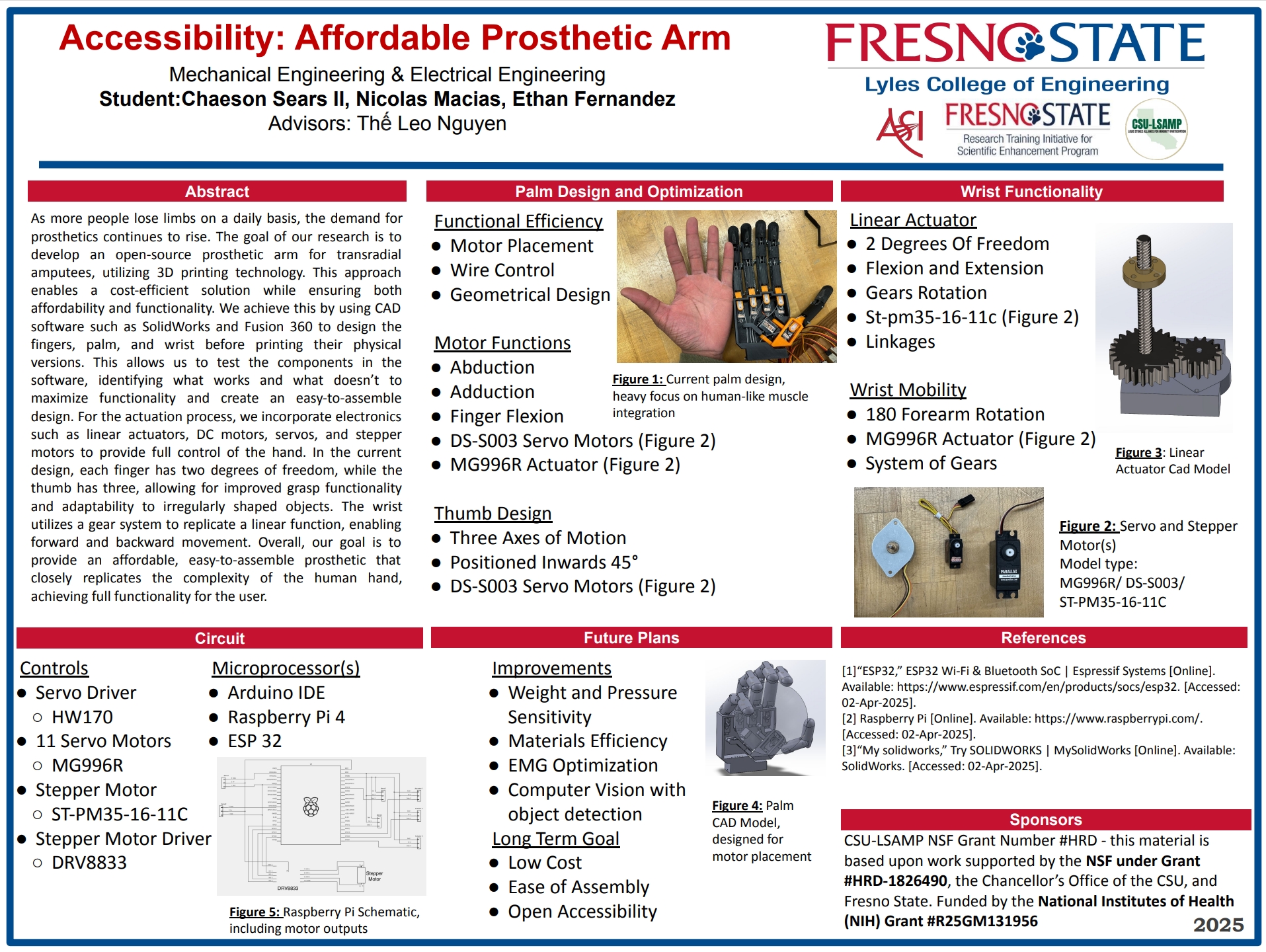
Summary: As more people lose limbs on a daily basis, the demand for prosthetics continues
to rise. The goal of our research is to develop an open-source prosthetic arm for
transradial amputees, utilizing 3D printing technology. This approach enables a cost-efficient
solution while ensuring both affordability and functionality. We achieve this by using
CAD software such as SolidWorks and Fusion 360 to design the fingers, palm, and wrist
before printing their physical versions. This allows us to test the components in
the software, identifying what works and what doesn’t to maximize functionality and
create an easy-to-assemble design. For the actuation process, we incorporate electronics
such as linear actuators, DC motors, servos, and stepper motors to provide full control
of the hand. In the current design, each finger has two degrees of freedom, while
the thumb has three, allowing for improved grasp functionality and adaptability to
irregularly shaped objects. The wrist utilizes a gear system to replicate a linear
function, enabling forward and backward movement. Overall, our goal is to provide
an affordable, easy-to-assemble prosthetic that closely replicates the complexity
of the human hand, achieving full functionality for the user.
{kind=link}
Acoustic Absorption Characterization of Smart Solid State Aerospace Composites
Students: Heriberto Vasquez, Pablo Pantoja, David Diaz, Alexis Valencia
Mentors/Advisors: Dr. Sankha Banerjee
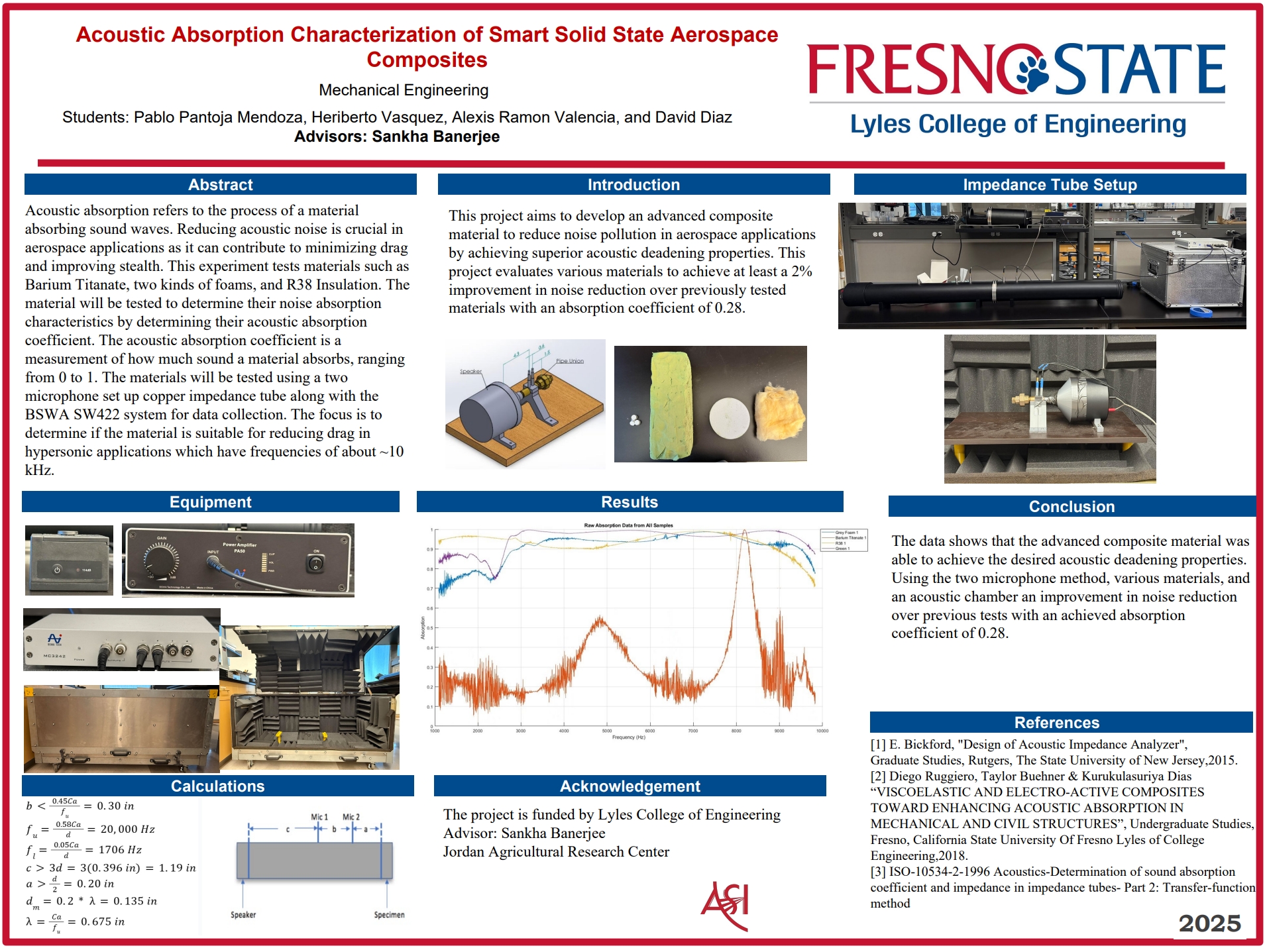
Summary: This project aims to develop a robust testing method for determining the acoustic
absorption coefficients of aerospace composite materials, with the goal of improving
noise reduction by at least 2% over a baseline material with an absorption coefficient
of 0.28. Reducing acoustic noise is vital for enhancing performance in aerospace applications
by minimizing drag. Materials tested include foam samples and composites like 2-phase
epoxy barium titanate, PLA barium titanate, and PLA barium titanate with MXene. Testing
was conducted using large and small impedance tubes across various frequency ranges.
A secondary objective was to design a smaller impedance tube for hypersonic frequencies.
The experimental data were analyzed and validated through quality control checks.
The expected outcome is the identification of a composite material with superior acoustic
absorption, advancing noise-dampening technologies in aerospace. Results will be presented
at Lyles College of Engineering Projects Day.
{kind=link}
ASCI Robotic Arm
Students: Eric Placsencia, Ariana Rajabi , Lauren Main, Michael Hoover
Mentors/Advisors: Dr. Sankha Banerjee
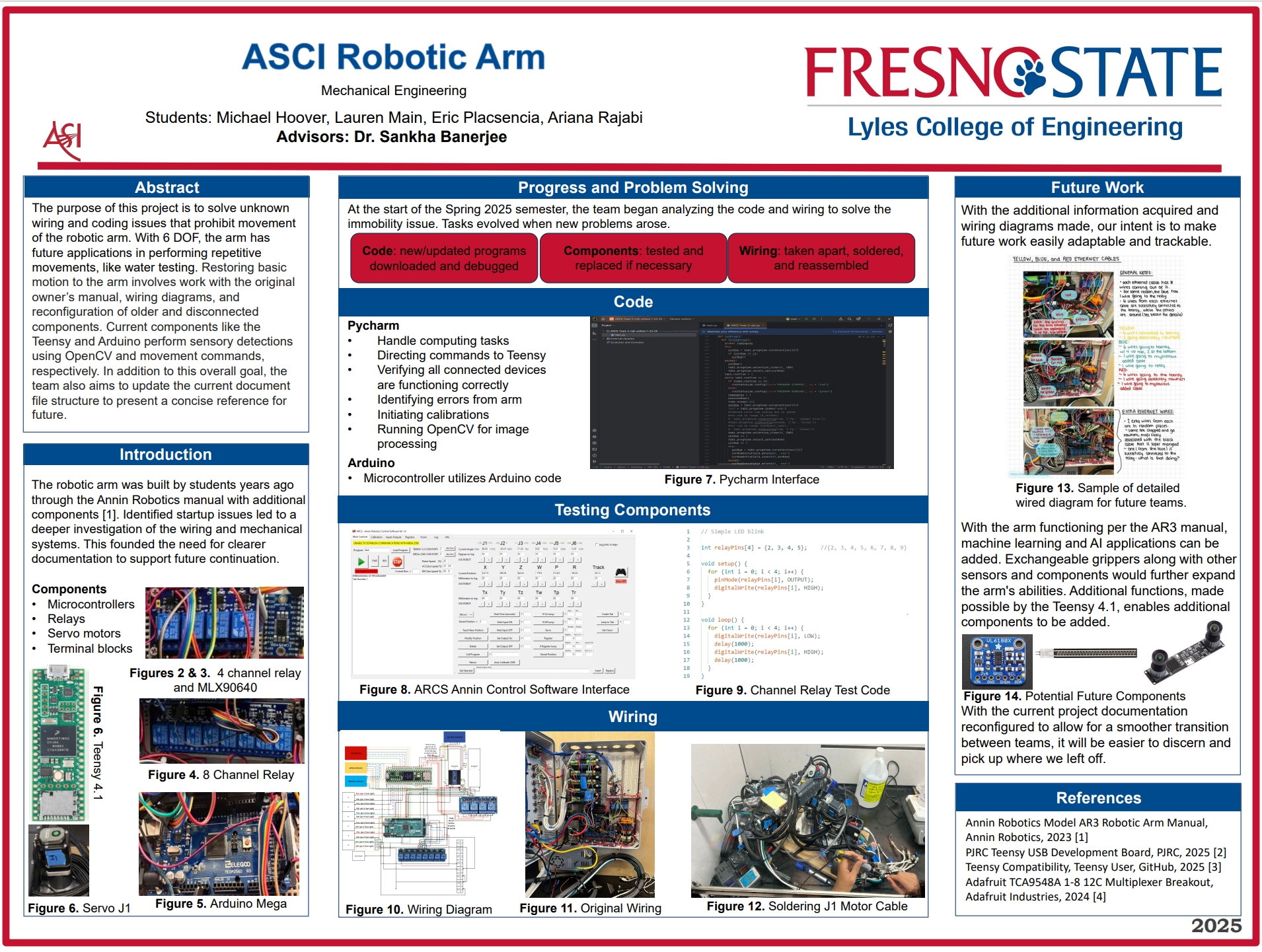
Summary: The ASCI Robotic Arm Project has the objective of constructing a 6 degrees of freedom
arm and developing the ability to navigate within its enclosure through the aid of
an integrated system composed of object recognition, target acquisition, and collision
detection features to perform experiments. This team aims to operate the arm using
a Raspberry Pi controller, with the main arm and kinematics running off the main computer.
Obtaining the basic motion from the arm involves work with the original owner’s manual,
wiring diagrams, and reconfiguration of older and disconnected components. Current
components like the Teensy and Arduino perform sensory detections using OpenCV and
movement commands, respectively. With the completed motion of the arm, the Raspberry
Pi can then be implemented to perform functions with the camera and sensors. In addition
to this overall goal, the team also aims to update the current document organizational
system, in order to present a concise reference for future use.
{kind=link}
Battery Performance Study Under Vibration Conditions for Space Vehicle Applications
Students: Hailey Messmer, Molly Taggard
Mentors/Advisors: Dr. Yuanyuan Xie
Sponsors: NASA
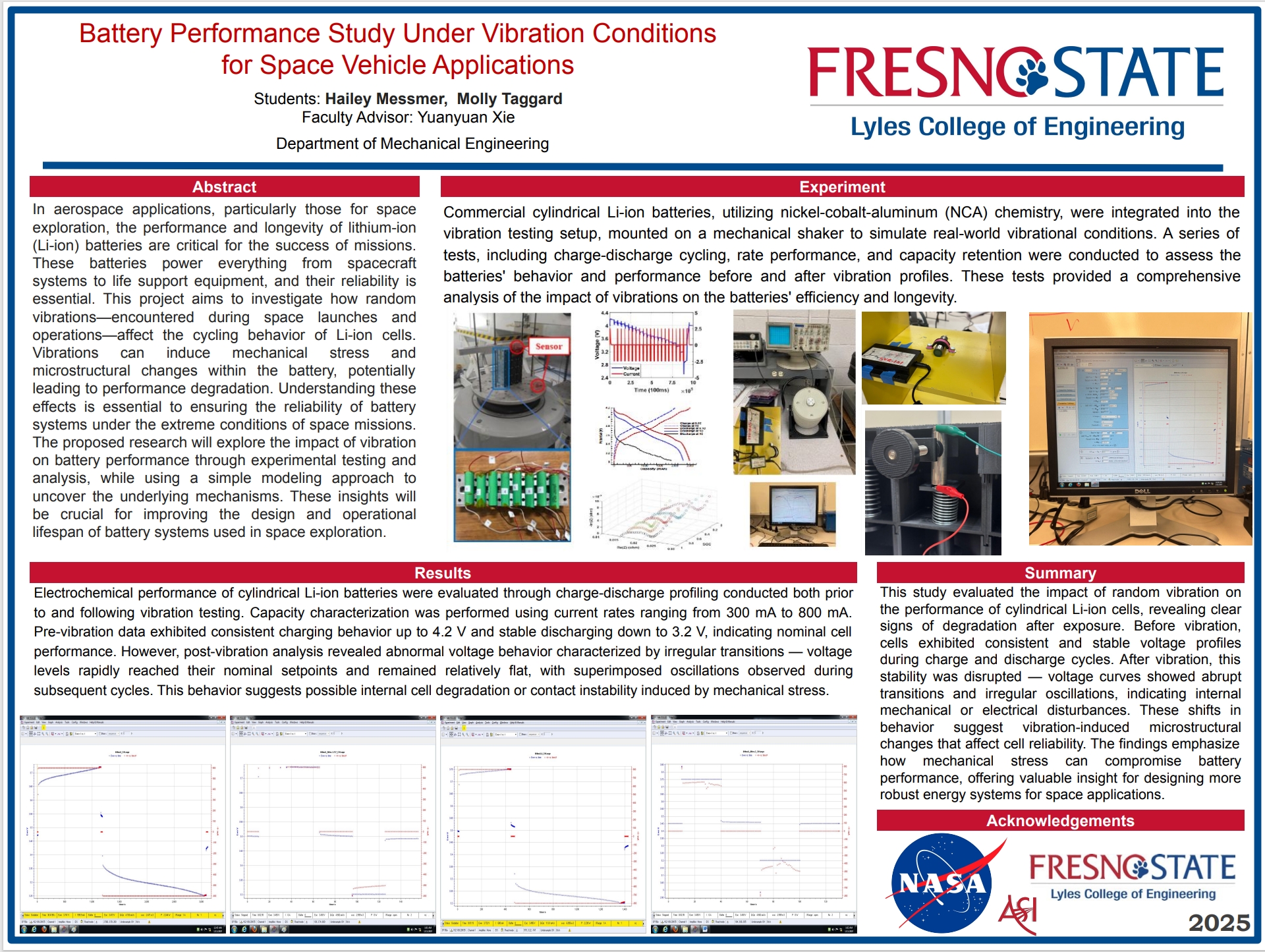
Summary: In aerospace applications, particularly those for space exploration, the performance
and longevity of lithium-ion (Li-ion) batteries are critical for the success of missions.
These batteries power everything from spacecraft systems to life support equipment,
and their reliability is essential. This project aims to investigate how random vibrations—encountered
during space launches and operations—affect the cycling and impedance behavior of
Li-ion cells. Vibrations can induce mechanical stress and microstructural changes
within the battery, potentially leading to performance degradation. Understanding
these effects is essential to ensuring the reliability of battery systems under the
extreme conditions of space missions. The proposed research will explore the impact
of vibration on battery performance through experimental testing and impedance analysis,
while using a simple modeling approach to uncover the underlying mechanisms. These
insights will be crucial for improving the design and operational lifespan of battery
systems used in space exploration.
{kind=link}
Citrus Harvesting End Effector
Students: Chase Pafford, Andrew Zhou, Ceejay Tactacan
Mentors/Advisors: Dr. The Nguyen
Sponsors: Dr. Alaeddin Bani Milhim
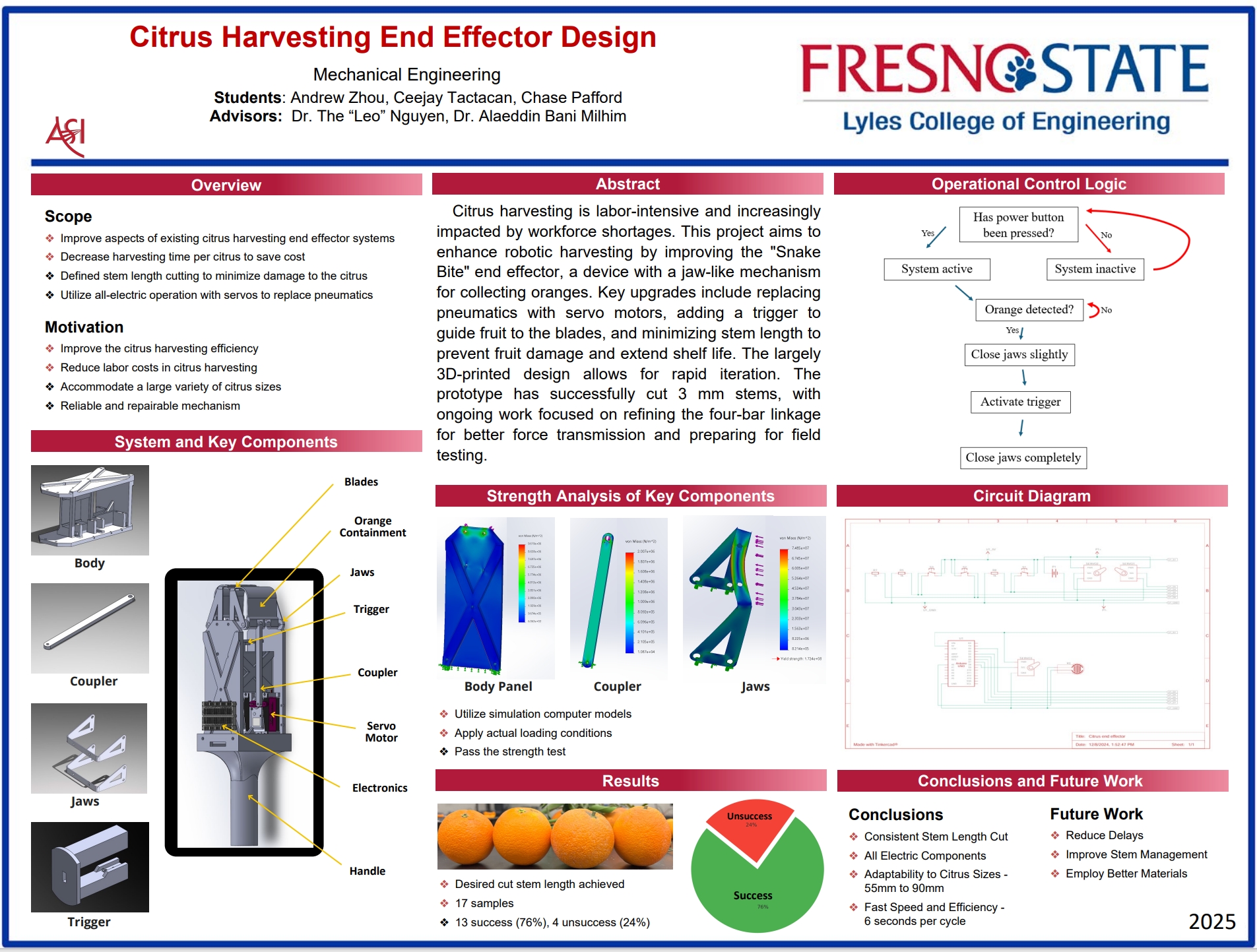
Summary: The shortage of manual labor and the limited window of harvesting for human labor
have negatively impacted the citrus industry in the United States, and California
particularly. The purpose of this project is to create an end effector that will harvest
citrus fruits, e.g. oranges, by cutting their stems at a minimal length to keep the
stub to act as a cap. Keeping a small of the stem (or “stub”) protects the rind of
the orange from rotting sooner and increases the shelf life. From many possible designs,
the team went with the “snake bite” concept to develop the prototype. Following the
calculations, the linkages were designed, and the servo motors were employed to provide
sufficient space and force to cut the stem. The design consists of stainless steel
and 3D printed plastic materials to save cost but maintain the strength and safety
standards for fruit harvesting. With a clever mechanism, the orange is positioned
in a way that the stem is cut at a minimal length without damaging the fruit. All
the actions of the end effector are controlled electronically by a microprocessor,
i.e. Arduino Uno, and powered by portable battery packs. The end effector is robust
and efficient in harvesting oranges, but there are improvements needed to be done
to make it more consistent and industrially ready.
{kind=link}
Development of a Low-Cost Six-Degree-of-Freedom Robotic Arm for Autonomous Harvesting
Students: Andrei Catalan, Daniel Yang
Mentors/Advisors: Dr. Alaeddin Bani Milhim, Dr. The "Leo" Nguyen
Summary: To effectively harvest citrus fruit using a robotic arm, various robotic arms, their
applications, and operational mechanisms were explored. Robotic arm kinematic equations
were studied and Denavit-Hartenberg (DH) parameters were analyzed to better understand
the robotic arm operation. Simulation environments in MATLAB/Simulink and Gazebo Virtual
Machine were used to model the robotic arm behavior, enabling a smoother transition
from virtual validation to real-world implementation. A market analysis was then conducted
based on key factors such as payload, cost, and accessibility. It was found that the
6-DOF robotic arm by Fairino fits the best due to its low cost and large payload capacity.
Additionally, a hands-on study conducted on existing robotic arms at Fresno State
allowed for suggestions on improvements for our own robotic arm such as the mechanism,
process, and design. The next steps include acquiring the selected robotic arm and
integrating it into a citrus harvesting robotic system.
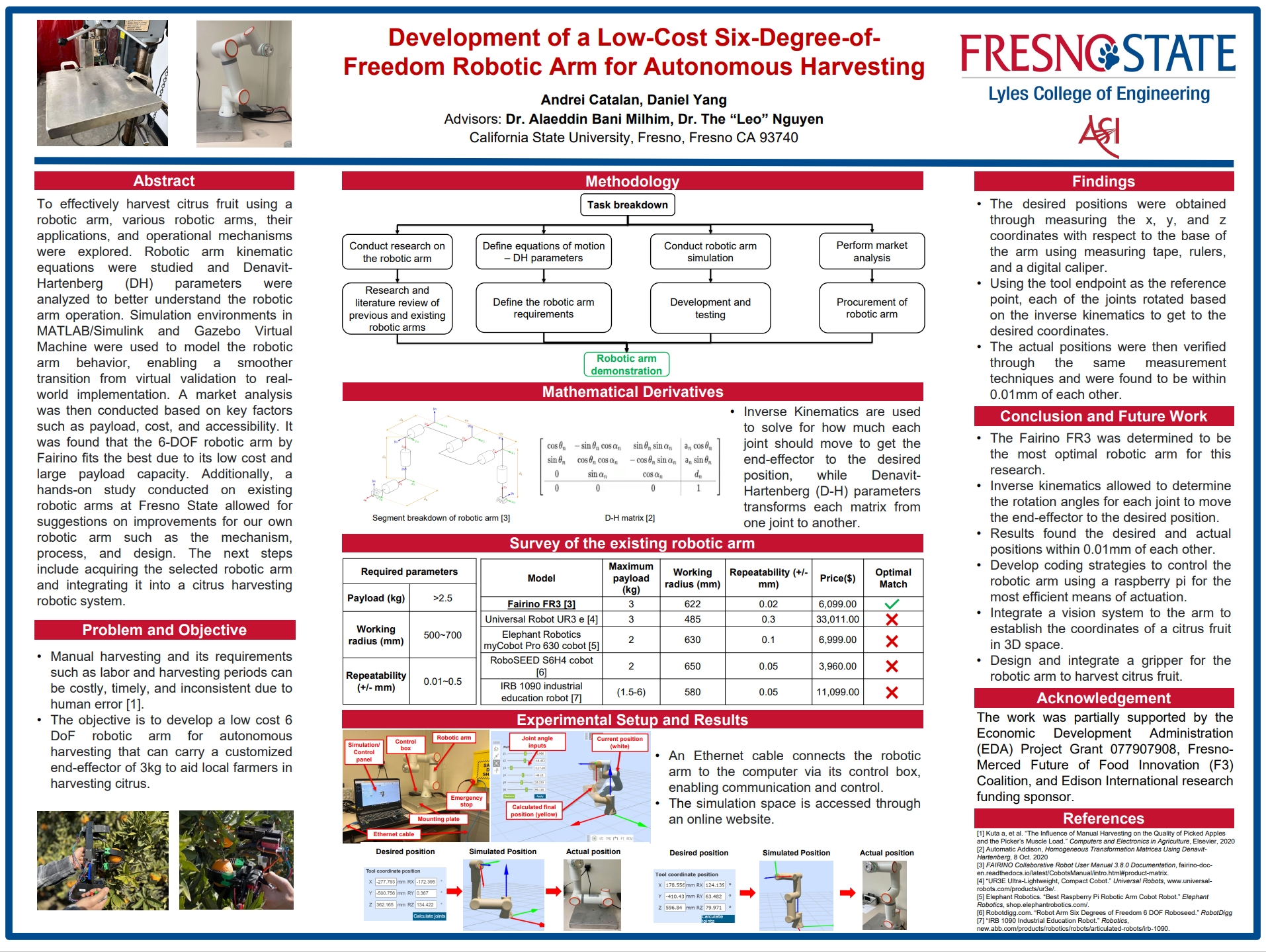{kind=link}
Development of a VTOL System for Search and Rescue Applications
Students: Aaron Edwards, Aaron Millwee, Brendan Chinnock, Jack Hodgson
Mentors/Advisors: Dr. Alaeddin Bani Milhim, Dr. Sankha Banerjee
Summary: Search and rescue drones are essential because they significantly enhance the speed,
efficiency, and safety of locating and assisting individuals in emergency situations.
Traditional search methods often require large teams, extensive resources, and long
hours, especially in challenging environments like dense forests, rugged mountains,
or disaster-stricken areas. Drones equipped with advanced imaging technology, such
as thermal cameras and AI-driven object detection, can rapidly scan vast or inaccessible
regions, identifying missing persons more effectively than human teams alone. Additionally,
drones reduce risks to rescuers by minimizing exposure to dangerous conditions and
can deliver emergency supplies to sustain victims until help arrives. Their cost-effectiveness,
versatility, and ability to operate in harsh environments make them an indispensable
tool in modern search and rescue operations. The proposed VTOL (Vertical Takeoff and
Landing) drone is an innovative solution designed to revolutionize search and rescue
(SAR) missions in challenging environments like dense forests. Combining the maneuverability
of a helicopter with the efficiency of fixed-wing flight, the drone can hover and
navigate confined spaces with ease. It employs high-resolution cameras, thermal imaging,
and AI-driven computer vision to quickly locate missing persons, even in low-visibility
conditions. Once a person is identified, the drone autonomously delivers an emergency
care package containing water, food, and a GPS device, providing immediate relief
and facilitating communication with rescue teams. By reducing response times, lowering
operational costs, and minimizing risks to human rescuers, this drone offers a cost-effective,
efficient, and safe tool for SAR missions, disaster relief, and precision reconnaissance
in inaccessible areas.
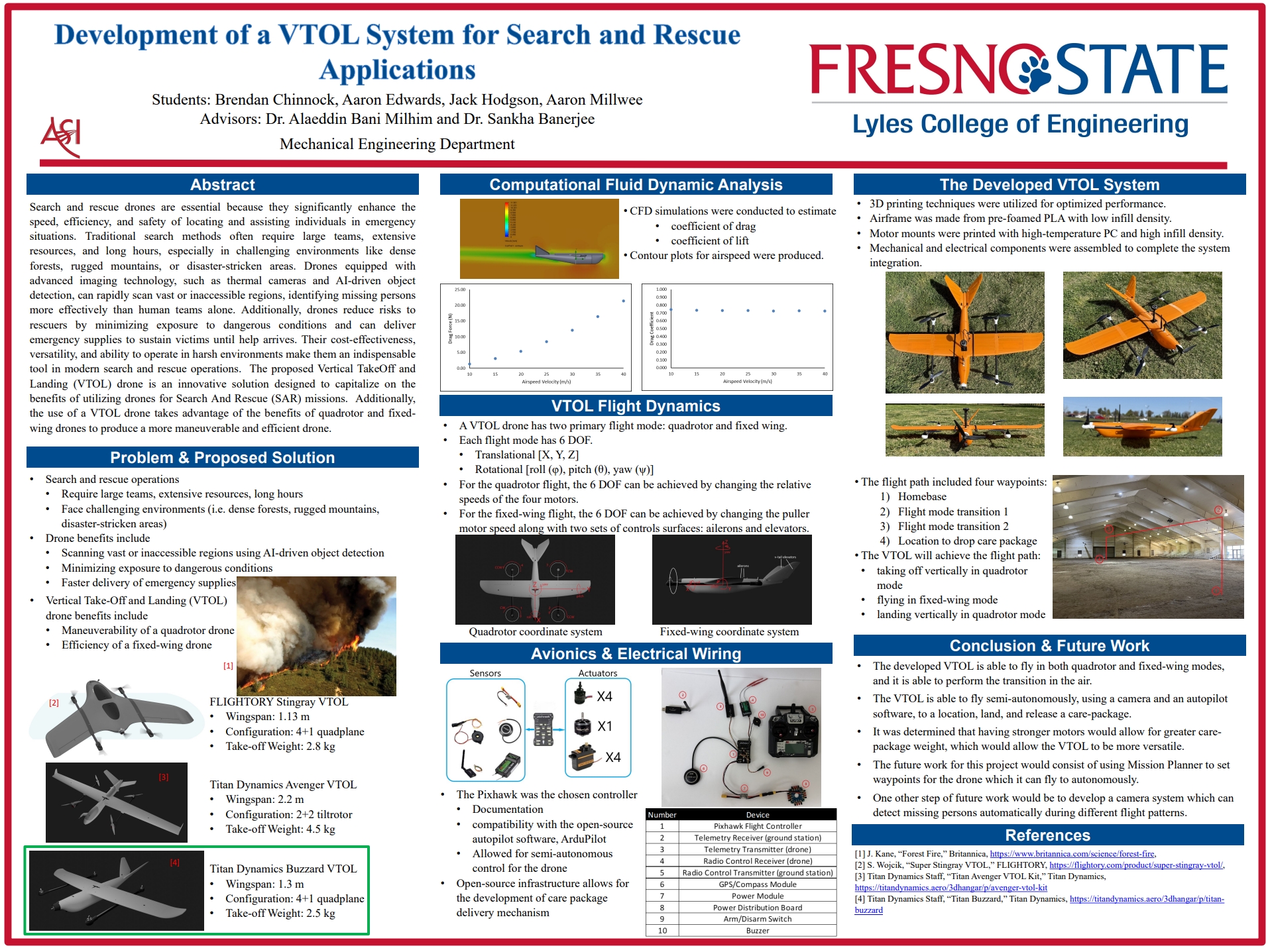{kind=link}
Development of an Electrodialysis-based Water Treatment System for Selective Removal
and Recovery of Phototoxic Contaminants
Students: Parshwa Khane, Jacob Carlos, Jaden Balanon, Timmy Vang, Carlos Penaloza
Mentors/Advisors: Dr. Sankha Banerjee
Sponsors: Fresno State, USDA
Summary: This project’s focus is the creation of a conductive 3D filament, building on prior
research, including its development using Barium Titanate in PLA processed in DCM
to achieve the desired qualities. The overarching function of the different components
of this project is to create 3D conductive filaments with additive processes involving
solvents to incorporate Barium Titanate into PLA using the solvent DCM.
Manufacturing of the filament includes the composite and 3d pellets dissolved in a
solvent before the slurry is processed in the 3devo filament maker. Barium Titanate
is a ferroelectric, pyroelectric, and piezoelectric ceramic material that exhibits
the photorefractive effect, its structure is that of a perovskite, increasing its
electrical performance potential. Additionally, the solvent is a known well-insulator,
and when introduced to outside impurities, becomes an excellent semiconductor. Dichloromethane,
or DCM, is an excellent solvent due to its low polarity, but potential to polarization,
adapting to that of the compounds it dissolves, in this case, the PLA mixed with Barium
Titanate.
The purpose of the development of this project is the application to the use of developing
a regolith-integrated filament.
Development of an Integrated Plasma Enhanced 3D Printing System: Active Regolith Composites
Progress Report
Students: Aidee Gonzales, Colton Cunningham, Seth Allen Danega, and Ezequiel Trujillo
Mentors/Advisors: Dr. Sankha Banerjee
Sponsors: Fresno State
Summary: This project’s focus is the creation of a conductive 3D filament, building on prior
research, including its development using Barium Titanate in PLA processed in DCM
to achieve the desired qualities. The overarching function of the different components
of this project is to create 3D conductive filaments with additive processes involving
solvents to incorporate Barium Titanate into PLA using the solvent DCM. Manufacturing
of the filament includes the composite and 3d pellets dissolved in a solvent before
the slurry is processed in the 3devo filament maker. Barium Titanate is a ferroelectric,
pyroelectric, and piezoelectric ceramic material that exhibits the photorefractive
effect, its structure is that of a perovskite, increasing its electrical performance
potential. Additionally, the solvent is a known well-insulator, and when introduced
to outside impurities, becomes an excellent semiconductor. Dichloromethane, or DCM,
is an excellent solvent due to its low polarity, but potential to polarization, adapting
to that of the compounds it dissolves, in this case, the PLA mixed with Barium Titanate.
The purpose of the development of this project is the application to the use of developing
a regolith-integrated filament.
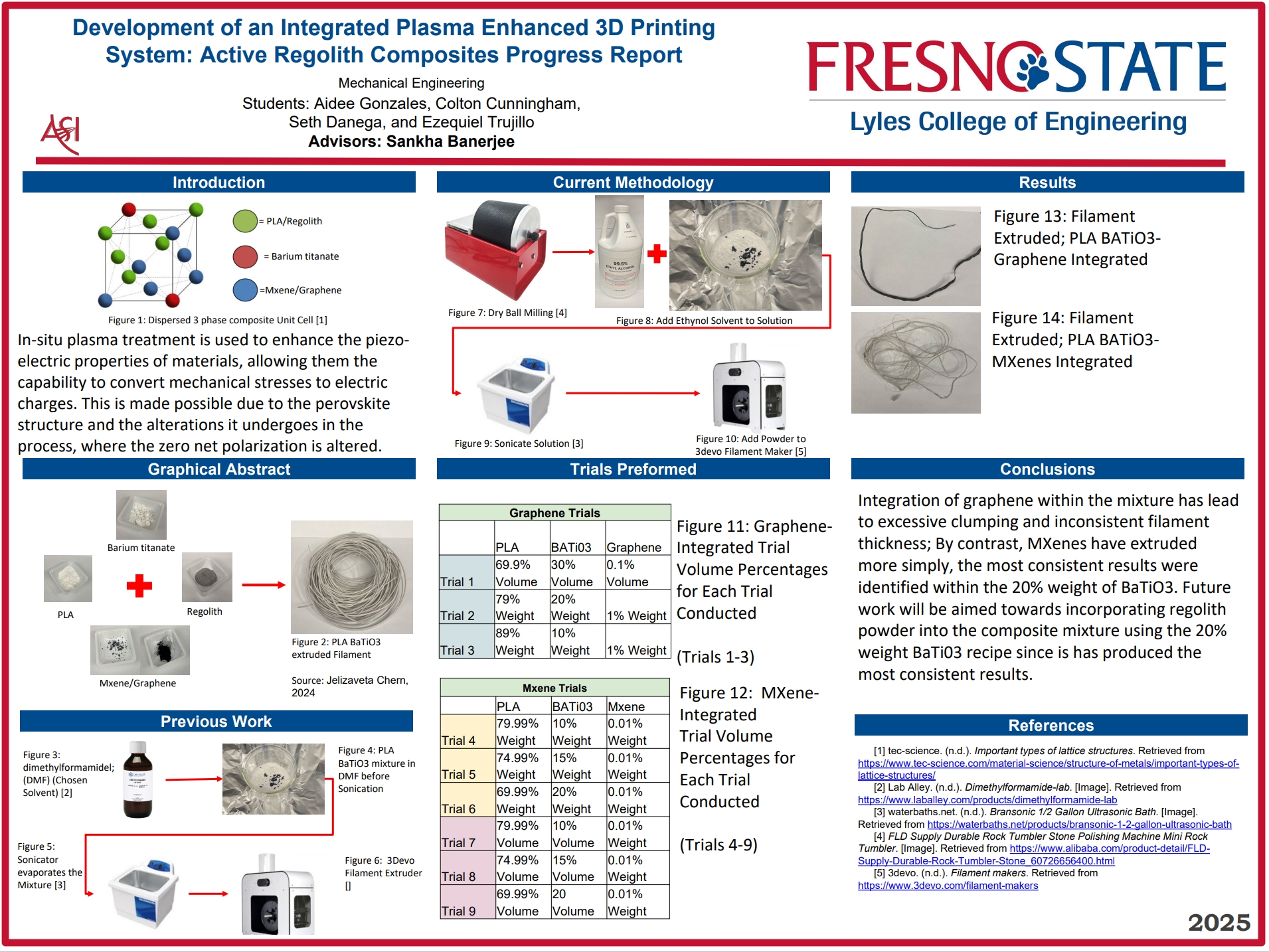{kind=link}
Development of Enhanced UAV-Based Drilling System Using Downward Thrust Generation
Students: Aaron Millwee, Brian Obichere, Brianna Vidrio
Mentors/Advisors: Dr. Alaeddin Bani Milhim
Sponsors: LCOE Undergraduate Research Grant, CSUF Undergraduate Research Grant
Summary: Unmanned Aerial Vehicles (UAVs) are widely used for agriculture applications. UAVs
offer a practical solution for gathering data from field-deployed sensors that require
longer deployments. Another application involves utilizing UAVs to deploy sensors
and plant seeds in remote or hard-to-access locations, where traditional methods may
be difficult or costly. Such tasks often involve additional actuators resulting in
greater complexity. An effective drilling requires pressure applied against the surface;
however, UAVs are designed to generate thrust upward. The previous phase of this research
concluded that pressure toward the surface can be generated by switching the propeller
rotation directions. Building upon these findings, this project is to design and develop
a quadrotor drone along with an auger drilling mechanism for the soil penetration
applications.
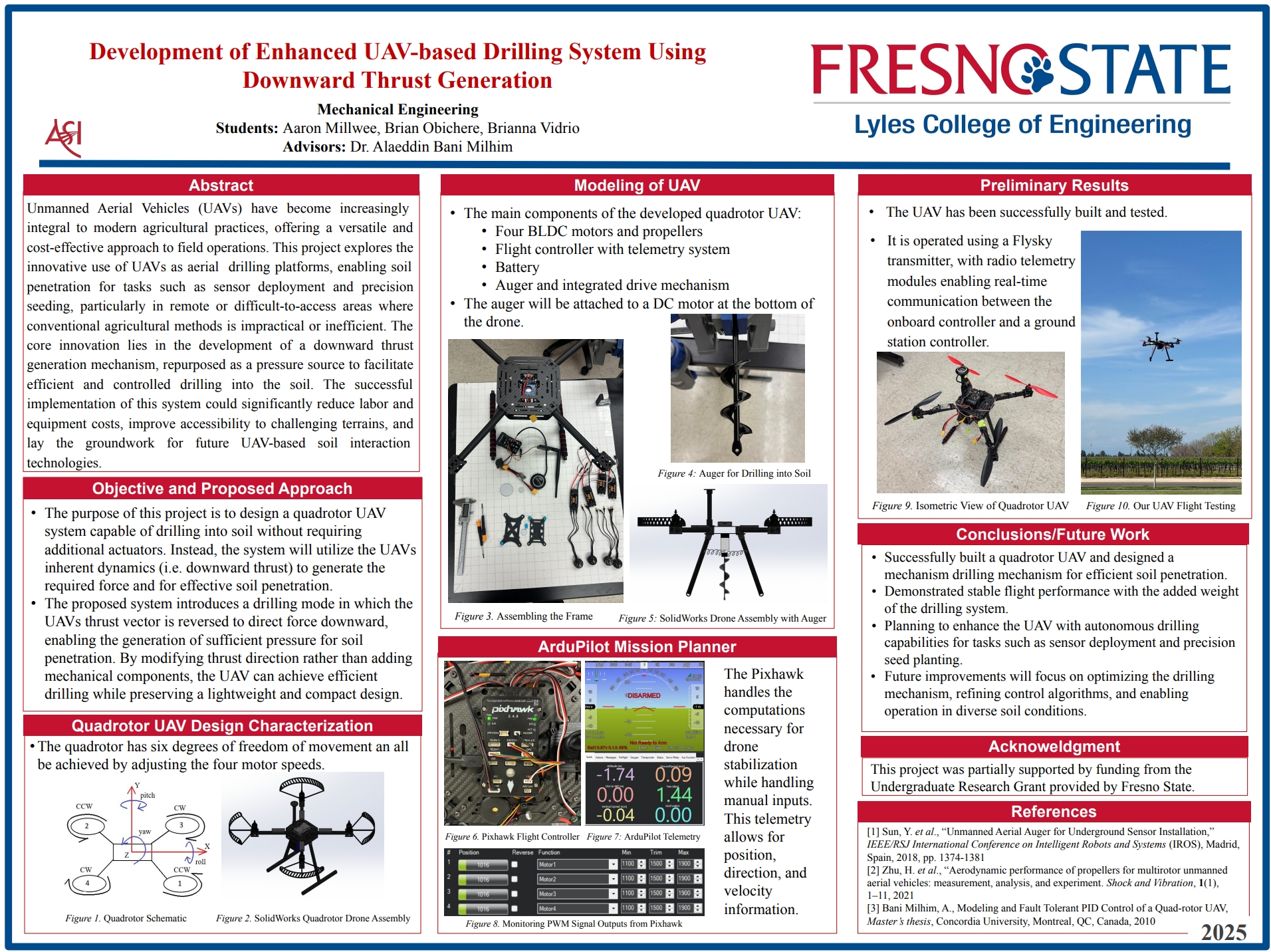{kind=link}
End-Effector Design: Precision Citrus Harvesting with Controlled Stem Length
Students: Juan Espinoza Jr., Brendan Chinnock, Caleb Bahne
Mentors/Advisors: Dr. Alaeddin Bani Milhim
Sponsors: Economic Development Administration (EDA) Project Grant 077907908, Fresno-Merced
Future of Food Innovation (F3) Coalition.
Summary: This project develops a high-precision end-effector for detaching oranges from their
stems. Unlike existing designs that prioritize speed over precision, this end-effector
minimizes post-harvest fruit damage by reducing stem length. The proposed end-effector
involves linear stage positioning of a cutter mechanism, current-based motor control,
and flexible gripper fingers. The experimental correlation between servo torque and
current is determined, gripper finger stress is analyzed, and 100 picking cycles are
performed in the field to characterize the end-effector. The linear relationship between
gripper torque and current is used to enable current-based contact detection. TPU
filament is selected for the gripper fingers to optimize finger displacement and von
Mises stress. The prototype is found to cut orange stems with diameters exceeding
4.20 mm to a mean stem length of 1.10 mm, reducing the risk of puncturing neighboring
fruit during collection. This project has strong potential for enabling high-precision
robotic harvesting systems.
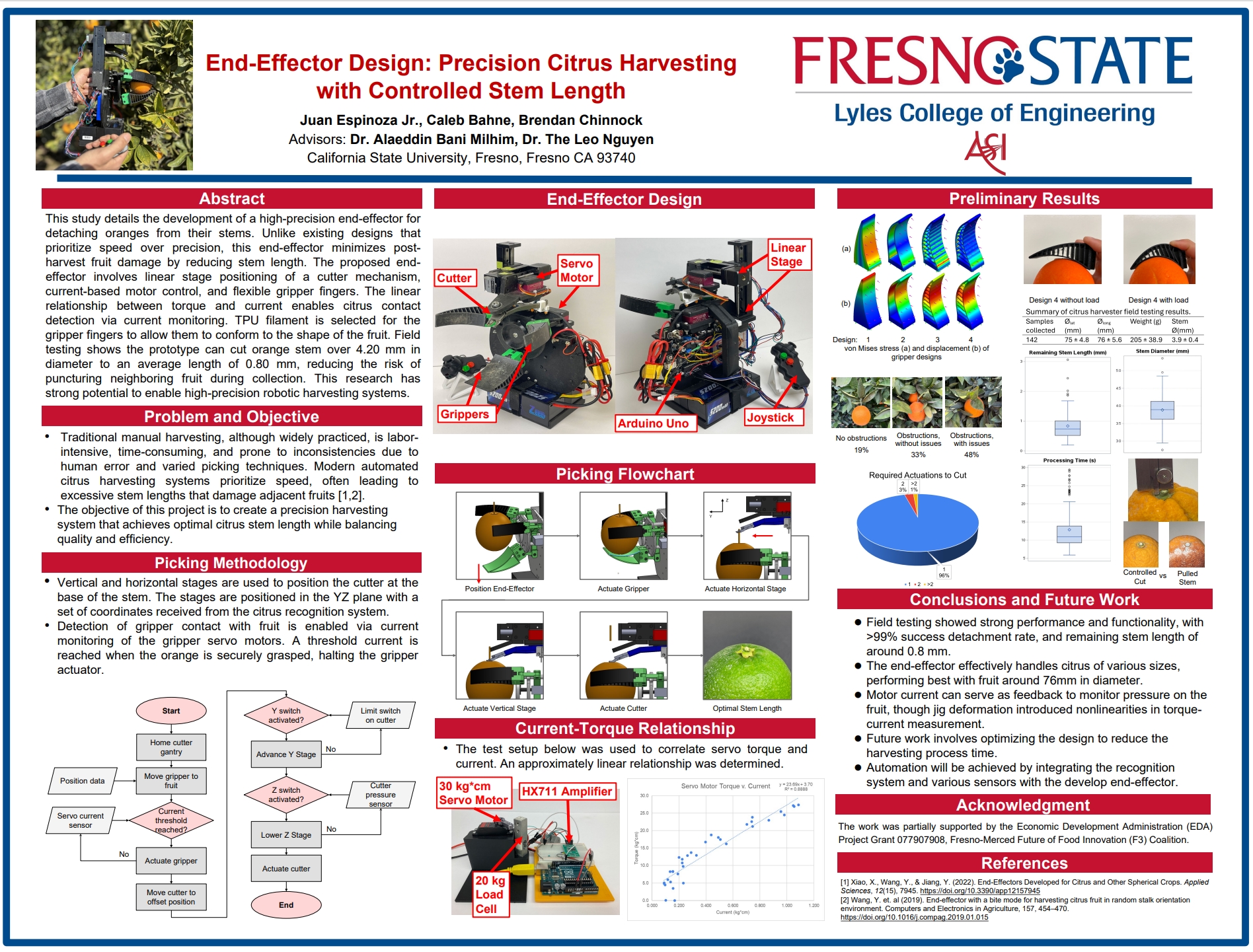{kind=link}
Full State Feedback Control of an Inverted Pendulum
Students: Joel Velez, Aaron Millwee
Mentors/Advisors: Ho-Lung Li
Summary: Inverted pendulum control is a commonly used benchmark in control theory. Despite
the relatively simple mechanical design of a pendulum cart system, its under actuated
and nonlinear nature make it an interesting controls problem with wide ranging applications
and solution methods. It extends well to the stabilization of rockets in flight and
launch, the movement of bipedal robots, or the balancing of uni-axial two wheeled
vehicles (Segway’s and similar vehicles). This project uses state feedback control
theory to control an inverted pendulum system. An optimal controller is applied to
the system using LQR (Linear Quadratic Regulator) to balance the pendulum in an upright
position and attempt to maintain the carts position.
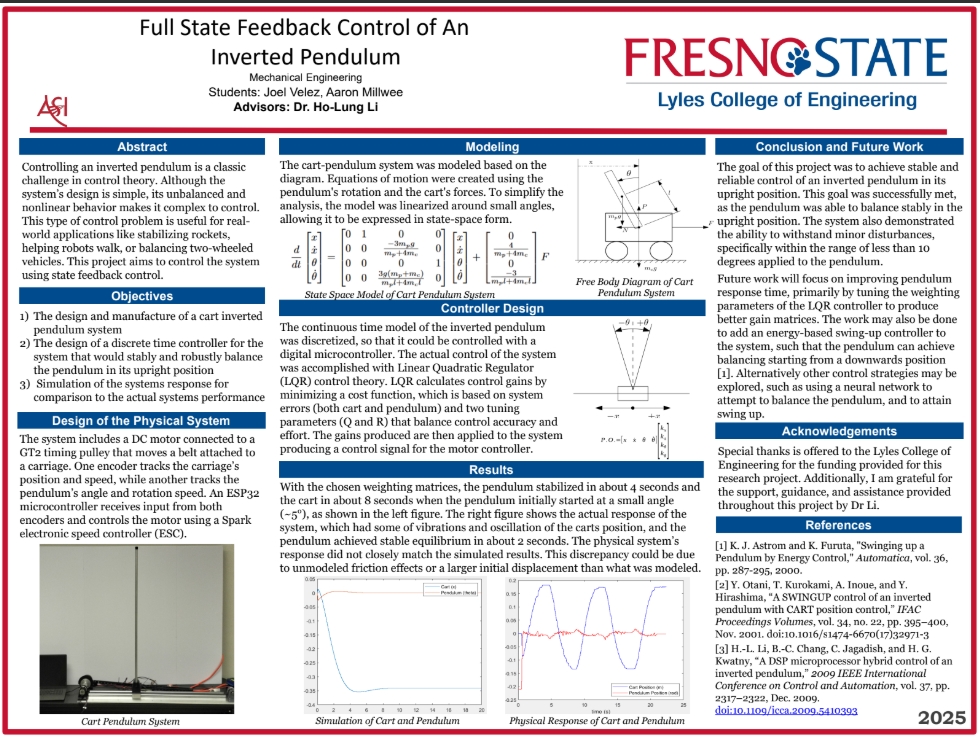{kind=link}
Hydroelectric Energy System
Students: Randall Balaga, Colton Cunningham, Aaron Edwards, Aidee Gonzales, Genie Lee, Aaron
Millwee, Jaden Balanon, Jacob Carlos, Joseph Estes, Carlos Estrada, Chaeson Sears
II, Timmy Vang
Mentors/Advisors: Dr. Yuanyuan Xie
Sponsors: Dr. Yuanyuan Xie
Summary: As supplies of fossil fuels continue to deplete, it is important to secure electrical
grid independence by sourcing alternative energy sources to provide sustainable power
for the future. Hydroelectric energy production presents an environmentally friendly,
renewable source of power, providing stability to the electric grid by producing power
during peak consumption while pumping to its reservoirs during low consumption. To
harness the untapped available energy from the hundreds of non-powered dams (NPDs)
in California, this project conceptualizes a plan for converting an NPD into a hydroelectric
dam capable of pumped storage hydropower (PSH). The West Valley Reservoir in Lassen
County, California was selected as an ideal target for conversion to PSH due to its
close proximity to existing substation infrastructure along with its smaller-sized
reservoir, which is an ideal size for optimizing hydroelectric power efficiency. One
component from the conceptual design will be selected to perform a deep dive research
in order to innovate and reduce the cost of the overall PSH. Additionally, a social
media page will be created to promote the work, findings, and challenges of this project.
Key considerations for creating the conceptual design are functionality, cost, environmental
impact, and power generation efficiency. The components required to create a conceptual
design will be sourced from "Non-Powered Dam Retrofit Exemplary Design for HydroPower
Applications" from Oak Ridge National Laboratory. While harnessing nature to provide
power, the project still seeks to balance that utilization with environmental stewardship.
By considering both the technical possibility and financial feasibility of the conversion,
the project plans to deliver a scalable PSH solution that can be deployed in regions
with suitable NPD sites, beyond just the West Valley Reservoir. This approach contributes
to the advancement of hydropower technology, further establishing its role in the
energy grid while remaining environmentally conscious.
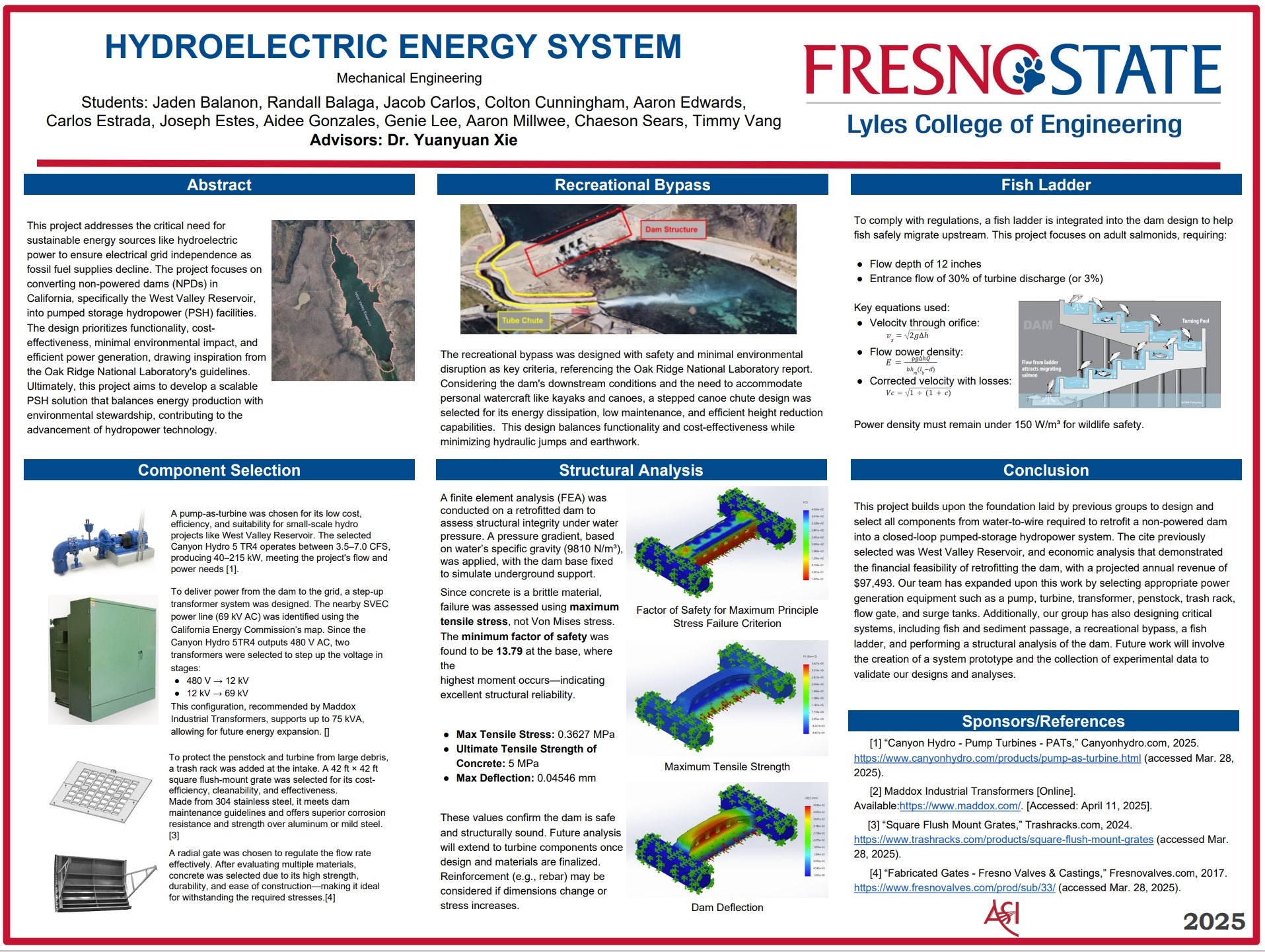{kind=link}
Mobile Arm Support
Students: Desiree Garcia, Genie Lee, Brian Obichere, Abraham Casanova
Mentors/Advisors: Dr. The Nguyen
Sponsors: Valley Children’s Hospital
Summary: According to the Centers for Disease Control and Prevention (CDC), approximately
5.4 million people in the U.S. live with some form of paralysis. For people with paralysis
or muscle deterioration in their upper limbs, completing everyday tasks such as brushing
their teeth or combing their hair becomes a difficult, almost impossible task. However,
while vertical motions fighting against the gravitational pull are challenging, horizontal
sweeping motions in a supported plane of motion are easier due to the lack of opposing
forces. Our Mobile Arm Support (MAS) utilizes the torsional springs at the joints
to offset the gravitational load upon the user’s arm and allows the user to freely
move it within the comfortable range of motion of an average human being. Its design
offers comfort, mobility, and independence from an assistant. Additionally, the device
is designed with low-cost materials and commonly sourced components to be affordable
and easy to maintain. MAS will help improve the quality of life for the users without
imposing a financial burden.
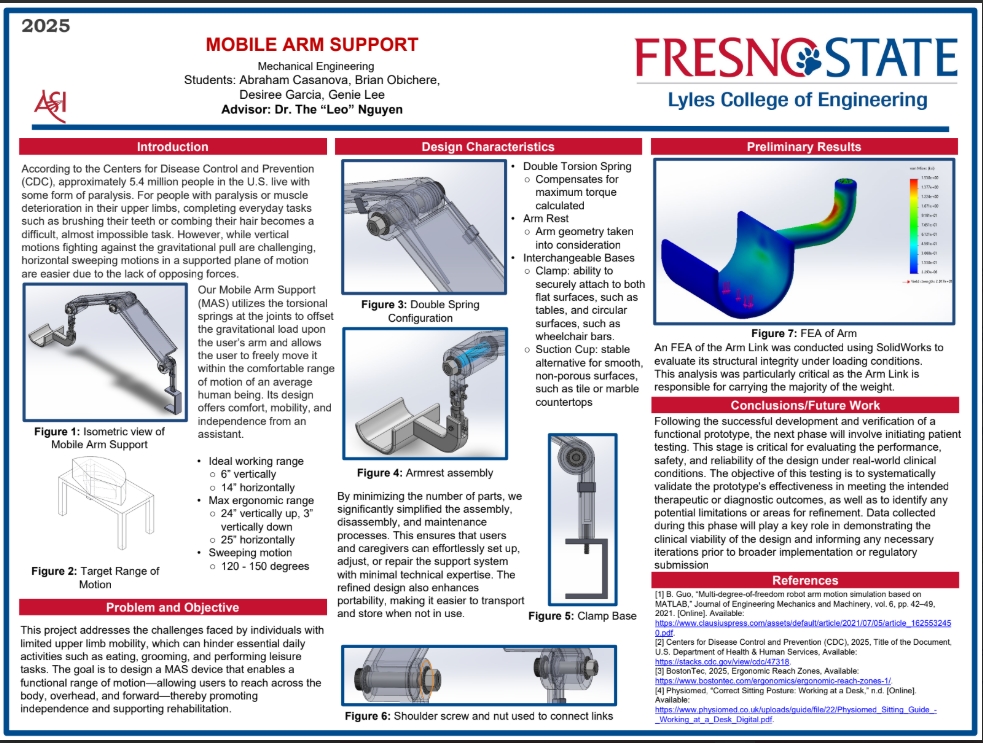{kind=link}
Optimization of Satellite Formation Reconfiguration
Students: Aaron Millwee
Mentors/Advisors: Dr. Aaron Hoskins
Summary: Satellite formation reconfiguration can significantly enhance the types and quality
of collected data. Previous research by others has investigated different reconfiguration
strategies. However, there has always been a predetermined mapping of the satellites
transitioning from the location in the first formation to the location in the second
formation. There are 24 different potential mappings for a formation of four satellites.
The research presented here will include all potential mappings in the optimization
process to determine the optimal formation reconfiguration strategy. Objective functions
minimizing overall $\Delta V$ and balancing $\Delta V$ over all satellites will be
implemented and compared. The inclusion of the nominal variable of the mapping will
necessitate the use of metaheuristics for the optimization process. The research will
investigate multiple metaheuristic algorithms to compare performance on these satellite
formation reconfiguration problems.
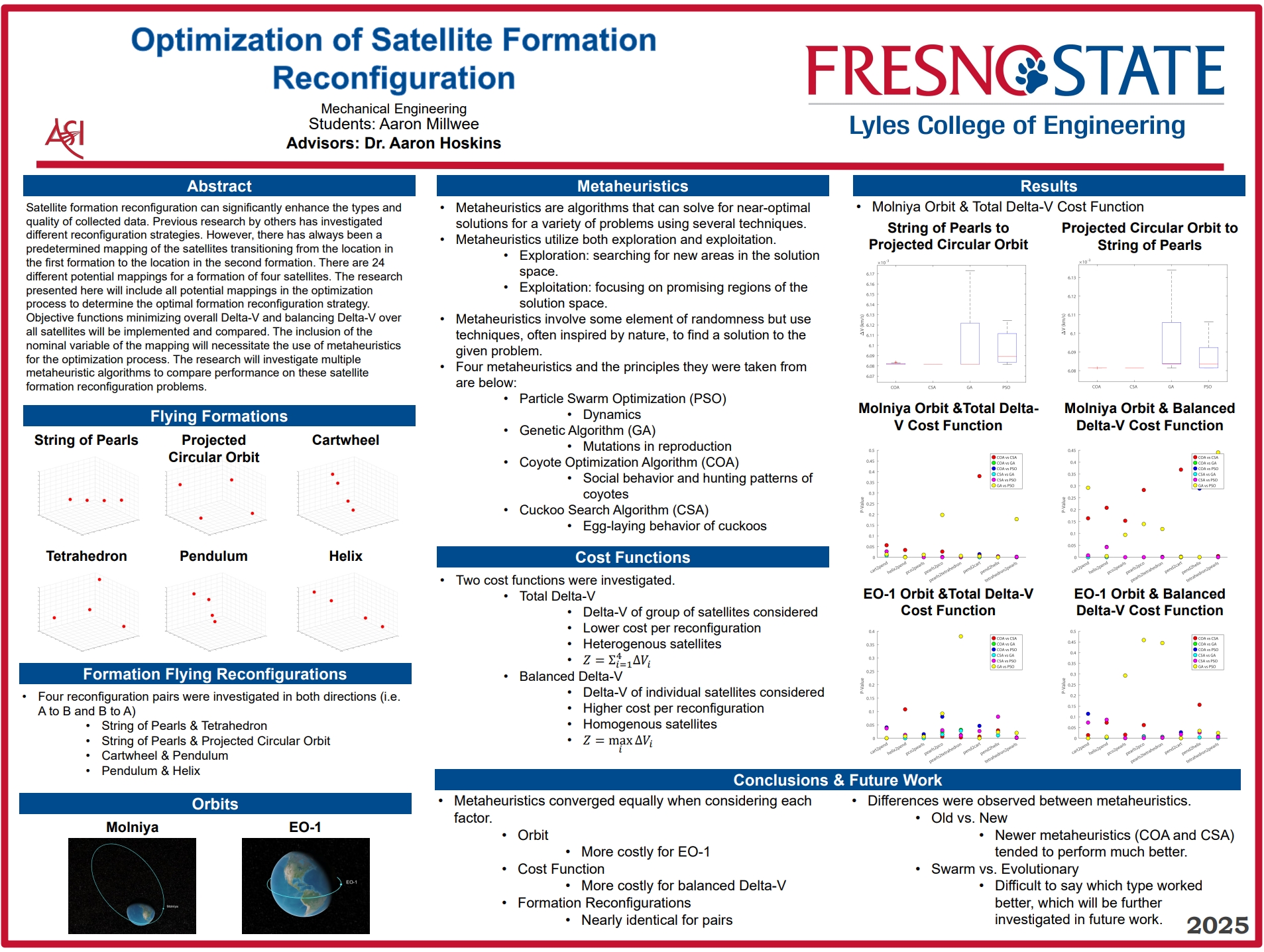{kind=link}
Pollutus Imperium Trees (PIT): A Modular Cryogenic System for Urban Carbon Capture
and Utilization
Students: Ashutosh Goswami
Mentors/Advisors: Dr. Yuanyuan Xie
Sponsors: Edison Energy Research
Summary: This project aims to develop an innovative, energy-efficient Direct Air Capture (DAC)
system
designed to capture CO2 from both industrial exhaust systems and urban areas with
high pollution
levels. The system utilizes captured CO2 as a refrigerant (R744) in a closed-loop
cycle,
significantly enhancing DAC efficiency while offering a sustainable method for carbon
capture.
Powered entirely by renewable solar energy, the system targets high-emission industries,
including
factories and power plants, as well as urban environments such as roundabouts and
high-traffic
zones. Pollutus Imperium Trees (PITs) will be strategically deployed in these areas
and
interconnected through an underground pipeline network to enable seamless CO2 collection
and
storage, making the captured CO2 suitable for industrial applications such as synthetic
fuel
production and enhanced oil recovery. By leveraging the thermodynamic properties of
supercritical CO2 (sCO2), the system optimizes energy efficiency while minimizing
the operational
carbon footprint.
In addition to the technical design and simulation-driven performance evaluation,
this research
will incorporate a comprehensive Life Cycle Analysis (LCA) to assess the environmental
impacts
and efficiency of the DAC and Carbon Capture and Storage (CCS) systems. The LCA will
examine
the entire lifecycle of the system to determine the conditions under which CCS technologies
are
most feasible, including the level of efficiency needed for practical implementation.
Furthermore,
a detailed cost-efficiency analysis will be conducted to evaluate the economic viability
of the
system, including costs related to installation, operation, and scalability. This
analysis will help
identify optimal strategies to achieve both environmental and financial sustainability,
ensuring the
project’s long-term success. Ultimately, the research aims to provide a scalable,
cost-effective
solution for reducing global CO2 emissions and promoting a circular carbon economy.
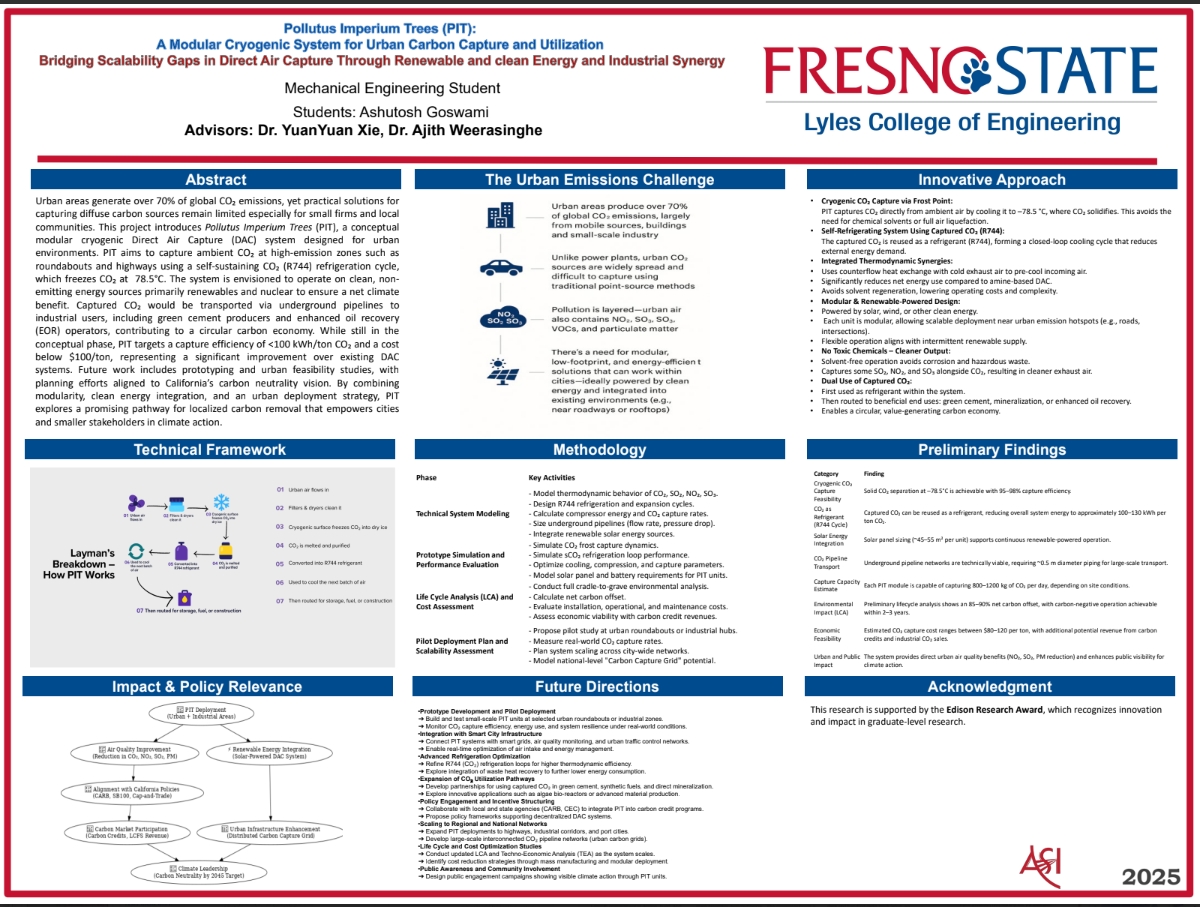{kind=link}
Solar Charging Station
Students: Alexa Alvarado, Harman Kaur, Alexander Ellis
Mentors/Advisors: Dr. Yuanyuan Xie
Summary: The solar tracking system is designed to implement innovative technology with intricate
designs to address practical challenges found from the rising demand for electric
charging stations. The design continues to operate three hours after sunset, maximizing
the time spent collecting energy throughout the day. The station uses a dual-axis
tracking system which allows it to automatically adjust to maximize directional sunlight
exposure alongside bifacial solar panels, which collects reflected sunlight. The charging
station is equipped to charge up to 6 scooters at a time with adaptive cables in order
to optimize solar energy transfer for electric scooter charging. This station serves
to promote the image of both Fresno State and renewable energy as it [showcases the
creative freedoms of students in the LCOE Department as it highlights the transformative
potential of renewable energy technologies, promotes the participation of students
in renewable energy, showcases fresno state’s commitment to renewable energy, and
doubles as a hands-on educational resource for renewable energy practices.
{kind=link}
Study of Two-Phase Flow and Salt Accumulation in Soil Irrigated with Recycled Water
Students: Jelizaveta Chern
Mentors/Advisors: Dr. Yuanyuan Xie
Summary: The aim of this research project is to create a model to simulate the movement of
air and recycled water through layers of soil in order to study the resultant deposition
and accumulation of compounds. All modeling is done using Comsol, a multiphysics simulation
software with the ability to model fluid simulations and chemical reactions. Chemical
reactions occurring between the compounds in the water and the soil matrix are simulated
in order to estimate their deposition over time, as increased use of recycled water
in areas with limited water such as California’s central valley can lead to a harmful
accumulation of salts and other compounds in agricultural lands. Long-term patterns
of deposition can be used to guide soil remediation procedures to optimize soil and,
in turn, crop health and output.
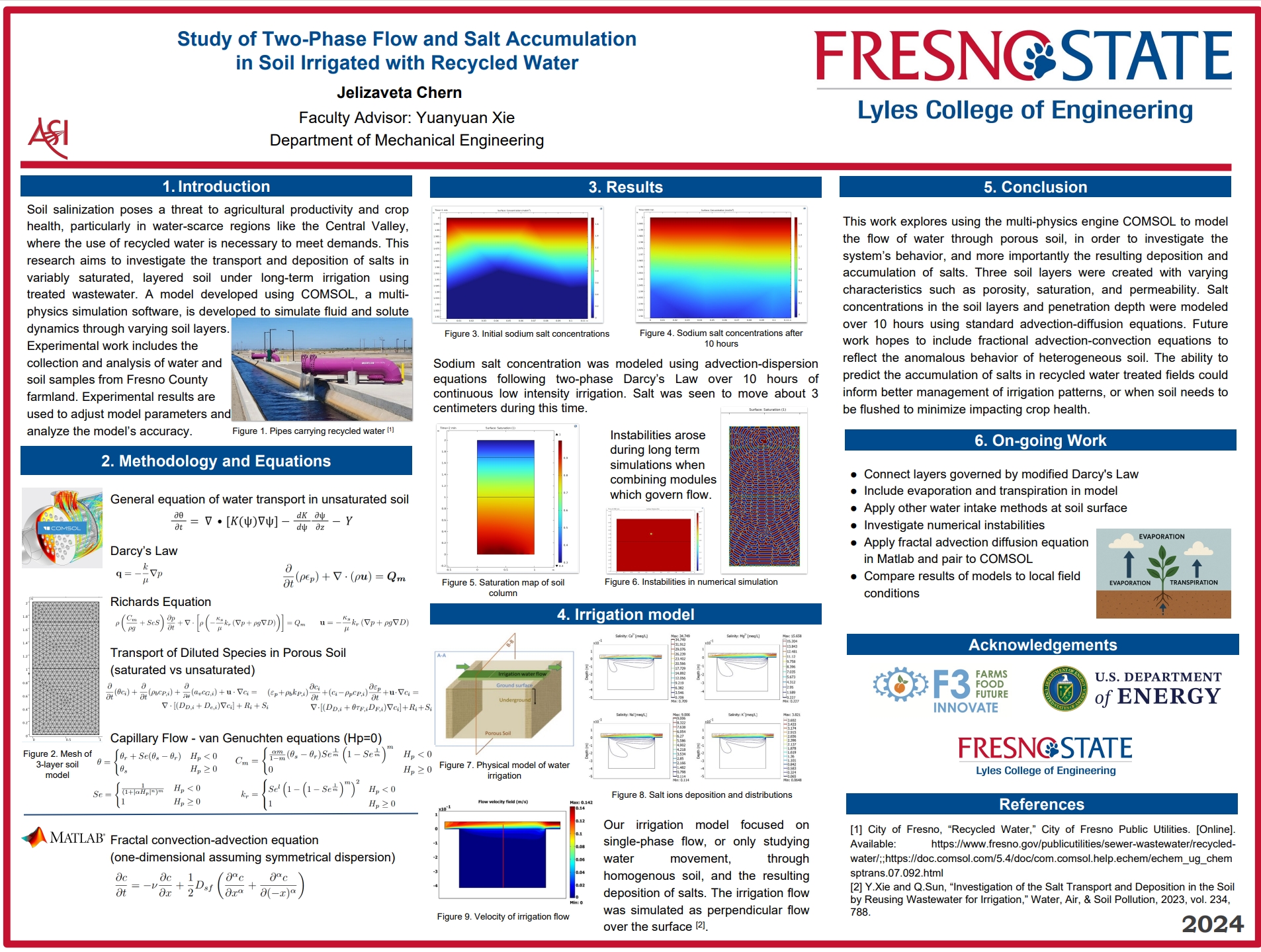{kind=link}
Supersonic Flow over a Spiked Blunt Body
Students: Sophie Lewis
Mentors/Advisors: Dr. Deify Law
Summary: This project uses ANSYS Fluent computational fluid dynamics software to simulate
airflow over a blunt body. By simulating supersonic (Mach 2) flow over this object
and configuring the boundary conditions and numerical settings, the resulting aerothermal
properties around the object can be calculated. The drag coefficient and surface heat
flux over the wall of this blunt body were specifically analyzed in this case. In
addition, an aerodisk spike was added to the nose of the body to observe the changes
in these properties. The length and disk diameter of the spike were varied to further
study the effect of the spike’s geometry on drag reduction and heat flux magnitude.
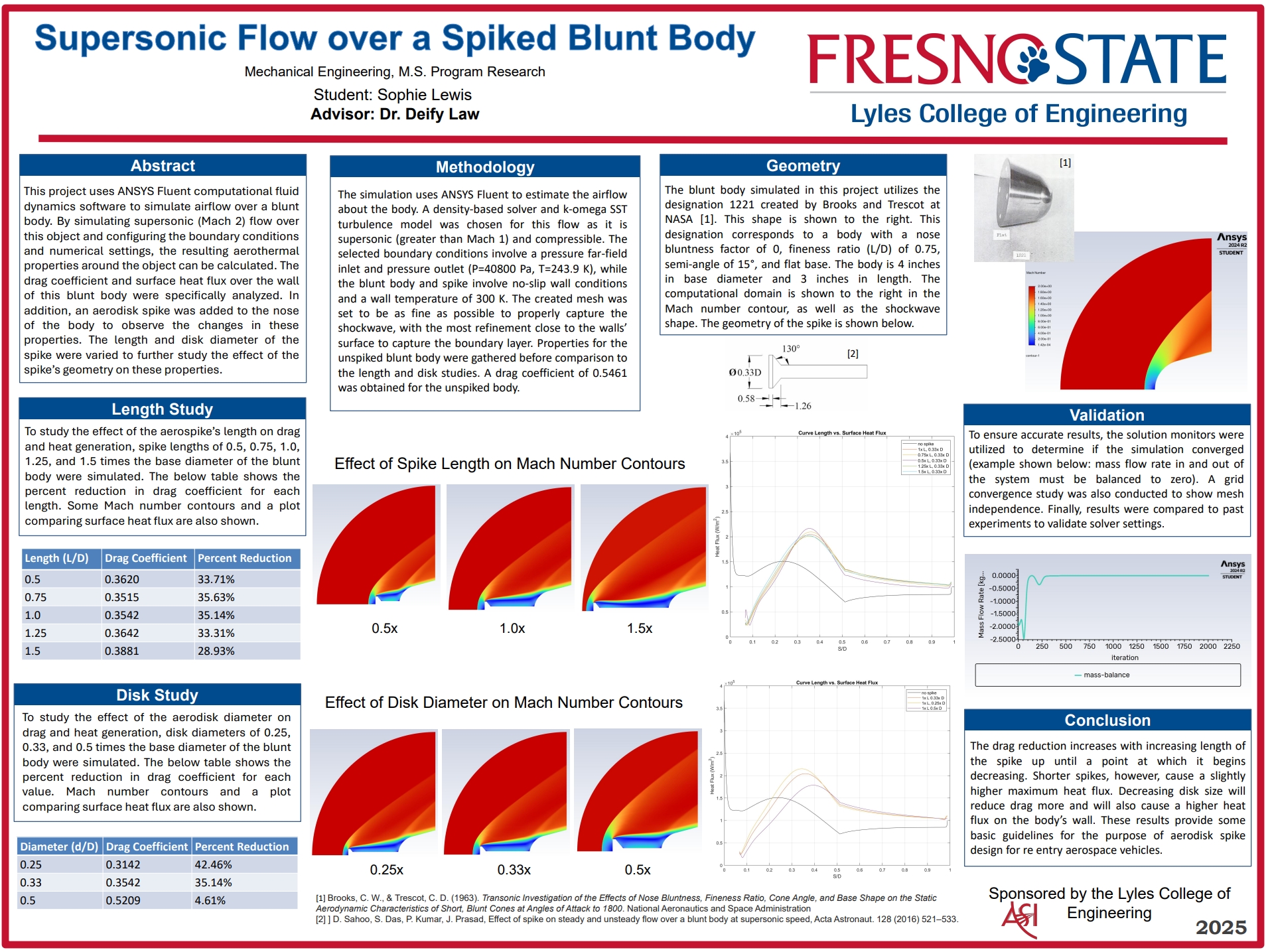{kind=link}
Voice Controlled Dextrous Prosthetic Hand
Students: Chaeson Sears II, Isaiah Altstatt, Diego Teran
Mentors/Advisors: Dr. The Nguyen
Summary: This project aims to develop an affordable prosthetic hand with advanced dexterity,
using 3D printing for cost-effective production. The prosthetic will offer a range
of motion similar to a human hand and perform tasks like opening door handles, turning
keys, opening bottle caps, etc—functions current affordable prosthetics struggle with.
The design optimizes actuator and linkage positions to ensure proper degrees of freedom,
while minimizing the need for screws and pins to reduce costs. The hand will be controlled
via stepper and servo motors, with control managed by either computer vision or voice
input, processed through a Raspberry Pi microprocessor. This approach seeks to create
a practical, accessible, and versatile prosthetic device.
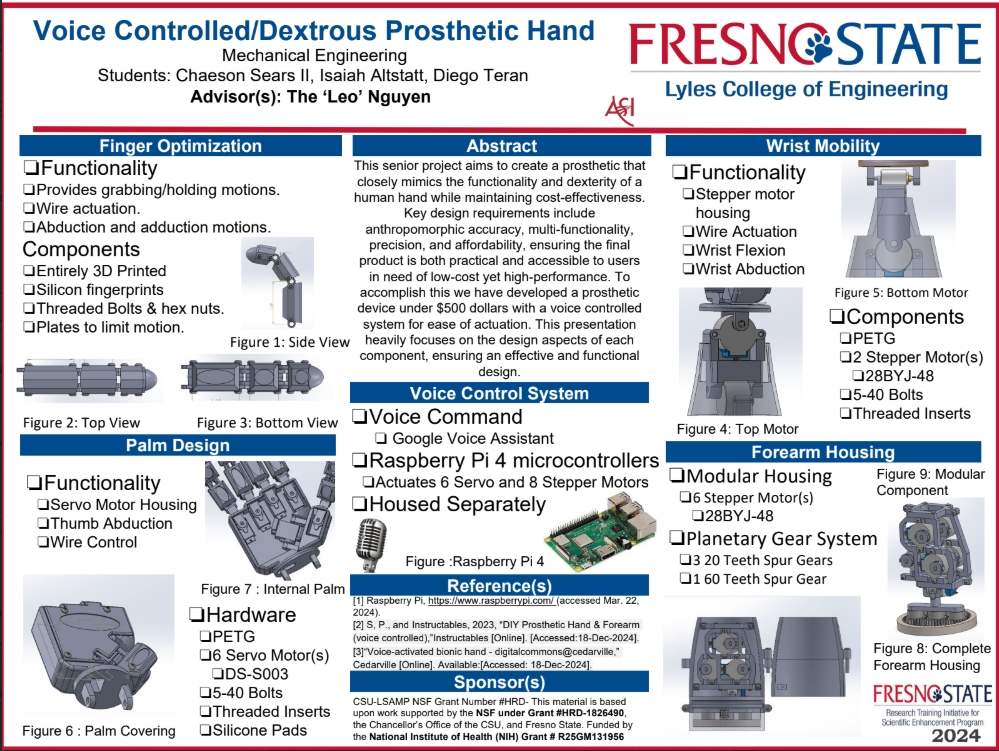{kind=link}
Career Technical Education Center (CTEC)
Application of Additive Manufacturing in Production of Bipropellant Rocket Engines
Students: Levon Melkonyan
Teacher: Brian Emerson
Summary: Bipropellant liquid rocket engines have established themselves as the most reliable
and efficient method of astronautical propulsion. Their complexity, however, leads
to high costs in equipment capital and manufacturing. Through prototyping with FDM
and SLA 3D printing, to final manufacturing in DMLS, the unique geometries a rocket
engine requires can more easily be produced; and especially iterated. This project
tests how additive manufacturing can be utilized in the production of these engines
to lower cost and complexity, namely in the injector and nozzle assemblies. With hot-swappable
and easily manufacturable components, different geometries, flow rates, and parameters
can be tested quickly. If injectors and nozzles can be rapidly developed on a small
scale, lessons could be applied to commercial-scale operations.
Coordinate Measurement Machines (CMMs) and they're Importance in the Manufacturing
Industry
Students: Joaquin Solis
Teacher: Brian Emerson
Summary: CMMs play a crucial role in engineering and manufacturing, ensuring precise measurements
for quality control. This project will start with independent learning through research,
industry mentorship, and hands-on testing. The machine's accuracy will be assessed
by comparing its measurements to those obtained from a dial caliper. It will also
compare measurements from the part to the 3D model. Findings will be documented in
a simplified instructional manual for the CMM to be used in the future of this high
schools curriculum. This project will demonstrate the CMM's functionality, highlight
recorded data, and emphasize the significance of CMM technology in modern manufacturing.
From Glove to Grip: Enhancing Accessibility Through Gesture-Controlled Robotics
Students: Noah Brown
Teacher: Brian Emerson
Summary: This project focuses on developing a wirelessly controlled robotic hand capable of
motion and real-time responsiveness. It integrates servo motors, a microcontroller,
and wireless transceivers to translate user input into accurate mechanical movement.
The prototype demonstrates efficient signal transmission and mechanical reliability.
The access to readily available materials that this project represents shows that
human-machine interaction does not need to be extremely costly. Beyond the technical
achievements, this project lays the groundwork for further exploration into assistive
technologies. The ultimate goal is to contribute meaningful innovations that support
individuals with physical impairments and contribute to the field of human-machine
interaction.
Harnessing the Sun: Energy Output Comparison Between Fixed and Single-Axis Solar Panels
Students: David Perez
Teacher: Brian Emerson
Summary: This research analyzes the true potential of solar tracking solar panels in optimizing
energy output. In today’s shift from fossil fuels, innovations need to be made to
shift to more natural sources of energy, such as the sun. Traditional solar panels
capture sunlight to gather energy for only 5-6 hours a day, and while solar tracking
solar panels have been developed, they require a lot of energy to be constantly realigned,
therefore minimizing the extra energy they create. This study explores strategies
to use solar tracking solar panels to fulfill their purpose of increased energy absorption
and increased energy production. To evaluate the performance, the solar panels will
be tested in multiple states and stored in rechargeable batteries.
Mechanically Actuated Numeric Display
Students: Kooper Menefee
Teacher: Brian Emerson
Summary: This project focused on creating a modular, scalable numeric display that is driven
by a motor. Each display module is driven by a single small servo, and each set of
modules can be run from a single microcontroller. Inside each module, one rotational
input is interpreted into eight rotational outputs capable of displaying any single
integer. Once set to a number, the system will remain in that state until it is actuated
again, unlike traditional digital displays which require constant power. To reduce
overall cost, improve possible commercial viability, and increase prototyping capacity,
all components were manufactured using additive manufacturing methods such as SLA
(Stereolithography or Resin Printing) and FDM (Fused Deposition Modeling).
Omni-Directional Mobility Scooter
Students: Aaron Castillo, Tyr Hernandez
Teacher: Brian Emerson
Summary: Mobility scooters are used by individuals who face challenges with independent movement,
yet their design can limit the accessibility they are meant to provide. Our project
focuses on developing an Omni-Directional Mobility Scooter, which aims to change how
users navigate their environments. Using omnidirectional controls, we enhance flexibility,
adaptability, and ease of use, allowing individuals to move through tight spaces,
uneven terrain, and crowded areas with more control and flexibility. With this design,
users can maneuver in any direction, improving accessibility in various environments.
This will also help boost the quality of life for those who are restricted to using
mobility scooters as their primary mode of transportation.
Road Modification Through the Lens of Traffic Data Visualization and Analysis
Students: Johnathon Le
Teacher: Brian Emerson
Summary: Traffic congestion caused by ineffective road design or changes in road usage over
time is a prominent challenge in transportation engineering. This project focuses
on analysis of intersection data collected for a traffic impact analysis report. The
goal is identification of key trends supporting a modification proposal rooted in
data-based logic. Though more information is available, the most relevant variables
referenced in the report are queue, traffic volume, peak times, turn volume, and traffic
counts. AutoCAD is used to visualize the road in its current and proposed conditions.
By analyzing and interpreting the data, the project aims to recreate the mind-space
of a professional civil engineer asked to redesign a road.
The Modular Mega-Stadium: Engineering the Future of Efficient Stadiums
Students: Artur Martirosyan
Teacher: Brian Emerson
Summary: The objective of this project is to innovate and improve stadium designs. With its
capacity being larger than the biggest stadiums currently in use. In addition to increased
capacity, enhancing stadium adaptability to host various sports and events in one
location is another objective. Furthermore, a challenge that is being solved is testing
the best method for preserving grass when not under direct sunlight. Altogether the
concept of the “Enhanced soccer stadium” is to design a one-of-a-kind stadium with
increased capacity, a creative solution to unfriendly weather conditions, and a system
that allows it to be used for various purposes therefore maximizing the possible revenue,
and the final objective of the project is to assess how feasible this concept would
be when scaled up to a full-size stadium. Additionally this project includes prototyping
ideas and concepts for better visualizing how the most efficient stadium in the world
would look like.
Edison High School Projects
Aural Tapestry
Students: Yeabsira Degol Assefa, Christopher Andrew Benitez, Ri-Ana Mia Johnson, Derek Julian
Merida, Lynette Rosaline Sagisi
Teacher: Xiong Cha
Summary: With the growth of the population in suburban areas, the increased effects of noise
pollution become apparent. Noise pollution is especially impactful to neighborhoods
near railroads and airports. Increased exposure to loud noises over 65 DBS leads to
many adverse effects, such as hearing impairment, mental health disturbances, cardiovascular
disturbances, and sleep deprivation. By focusing on minimizing outside noise, we can
lower this exposure to loud noises and lower noise pollution. Through research, we
found that some of the main proponents of noise pollution are traffic and neighbors.
Research has shown that people with windows facing the street had 15% more annoyance
than others. To further acknowledge our problem is valid and relevant, a survey was
sent out to people living in suburban areas. The majority of people agreed that there
was a problem with unwanted noise and would like a solution. For our project, we wanted
to focus on an active noise-canceling system. The system will listen to outside noise
and in real time send an inverse sound wave to cancel out the noise. This system would
use destructive interference to do so.
DriveSafe Security
Students: Jose Sanchez, Micah Hernandez, Sunnie Gutierrez, Noah Mousseau, Elizabeth Ramirez
Teacher: Xiong Cha
Summary: Vehicle break-ins are a persistent and growing problem that affects millions of car
owners annually. These break-ins often lead to stolen valuables, damaged property,
and an increased sense of insecurity within communities. Traditional security measures,
such as car alarms, are often ineffective due to their ability to be bypassed or ignored
by passersby. This highlights the need for a more proactive and reliable solution.
Our device aims to address this issue by implementing advanced technology that enhances
vehicle security, preventing break-ins before they occur. By combining real-time monitoring,
smart alerts, and deterrent features, our solution provides car owners with greater
peace of mind, reducing the likelihood of theft and vandalism and ultimately contributing
to safer, more secure urban environments.
Jans Electrical
Students: Adam Flores, Salvador Solis, Jahir Lopez, Nickee Chanthavisay
Teacher: Xiong Cha
Summary: Power outages in Bucerias impact residents' daily lives, limiting the use of essential
appliances. Our project aims to develop an energy storage system that stores excess
electricity and provides up to 16 KW of backup power during outages or high-demand
periods. After surveying 18 families, we identified insufficient electrical supply
as the main issue, with 40% reporting appliance damage due to outages. To address
this problem, we plan to use a cheaper but reputable alternative to Lithium batteries,
with sodium-ion or lead-acid AGM/Gel batteries. Main features include overcharge protection,
thermal regulation, and weatherproofing to ensure reliability and safety. The system,
will be based on integrating with traditional electrical grids already in place, although
there could be room to expand it by integrating with electrical grids such as solar.
Our initial prototype, which will store 1kWh of energy, serves as a foundation for
improving electricity access in Bucerias.
Next Step Support
Students: Yuridia Juarez, Andrea Hernandez, Noelani Garcia, Martin Gonzalez, Rocco
Crum
Teacher: Xiong Cha
Summary: Many students with disabilities struggle completing day to day tasks we can
do normally. That's whether being able to get dressed, eat without any problems, walk
or even have a conversation with one another. We have seen first hand how these problems
affect students and make their lives harder to manage. We agreed on helping these
students since we don't know what they've been through and all the challenges they've
had to overcome. We visited ATP (Adult Transportation Program) in Fresno, and we witnessed
how the lives of the students with different disabilities work. We gathered information
from our perspectives and from our tour guide and learning advisor, Diana Ortega.
We debriefed and came up with three different categories for the different obstacles
the students came across, there is mild (students with sensory needs, students not
being able to access their garden area, angled spoons with grips for students that
can hold a spoon properly, moderate, ( they are able to identify what they'll buy
at the store, they're able to do math with money, (money math), able to read bus routes,
they can somewhat communicate through a TTS iPad, some even have a job) finally there
is severe, ( they need other people to help them get changed, to walk, they aren't
able to eat by themselves, they can't communicate, or they need adaptive items for
their missing limbs.) Our team settled on taking on the problem in the moderate section.
Our plan is to help the students have more control about activities they can do on
their own. We hope that with our help they'll feel more independent and have the confidence
to continue their life with minimal help from other people.
Privacy Guards
Students: Benjamin Cruz, Issaiah Del Toro, Jaime Jaurigue, Lauren Jones, Asyra Kalina
Teacher: Xiong Cha
Summary: Privacy Guard is a product that aims to increase personal security and privacy by
offering real-time detection of possible privacy intrusions. The point of this product
is to allow anyone weith this product to easily set up and close their room door with
their cell phone. The system gives you the freedom to close your room door without
the burden of standing up. The objective of this project is to create an affordable
and easy-to-use solution that can be easily applied in different settings to give
people more control over personal space. As we get older, privacy becomes more and
more of a necessity. Privacy Guard aims to turn this around by making a user-friendly
and affordable solution available that allows users to be in charge of the door to
their own bedroom. Using sensors that are capable of picking up radio frequencies,
and movement the device will give any movement is found to instantly turn off allowing
it to be completely safe for everyone or animals in a house.
Rodent Damages
Students: Jaden Hang, Noel Curiel-Armas, Abraham Ramirez Soriano, Jose Almaraz, Noelani Garcia
Teacher: Xiong cha
Summary: Our focus was on deterring rats from approaching and/or biting water lines. Through
our research, we found that rat activity is much more prevalent in rural areas compared
to urban ones. We explored various solutions to this issue, with one of the most common
approaches being the use of pesticides or other chemical treatments. However, we discovered
that many of these pesticides pose risks to human health, including an increased likelihood
of certain cancers, acute poisoning, and other internal complications. Our proposed
solution takes a different approach. Instead of relying on harmful chemicals, we aim
to use natural repellents combined with a protective barrier for the pipes. Specifically,
we suggest coating a metal sleeve with natural repellents such as peppermint oil,
eucalyptus, and spearmint. This sleeve would be designed to easily fit over water
lines while effectively preventing pests from causing damage.
SolarSpark
Students: Citlaly Avila, Andre Bernal, Carlos Diaz, Macy Chavez, Elizabeth Ramirez
Teacher: Xiong Cha
Summary: This project focuses on addressing the safety and efficiency challenges associated
with cleaning solar panels, particularly in California's valley where solar energy
is widely utilized. Solar panels, though essential for harnessing renewable energy,
often accumulate dirt, dust, and debris that reduce their performance. Regular cleaning
is crucial for maintaining optimal energy production, but it poses significant risks
to individuals, such as falls, slips, and exposure to electrical hazards. Additionally,
improper cleaning can damage the panels or void warranties. This project aims to develop
innovative, safe, and efficient cleaning methods for solar panels to reduce these
risks, ensuring the safety of workers and homeowners. By improving cleaning techniques
and exploring automated solutions, the project will help preserve solar panel efficiency,
promote the sustainable adoption of solar energy, and contribute to the long-term
success of renewable energy systems.
SORT-IT
Students: Galilea Sanchez Estela, Benjamin Santiago Barroso, Steven Torres Rivera, Isaiah Cardenas,
Lynette Rosaline Sagisi
Teacher: Xiong Cha
Summary: The increasing volume of waste generated by a growing population poses significant
challenges to existing waste management systems, leading to environmental pollution
and public health risks. On average, Americans generate approximately 5 pounds of
trash per day, highlighting the urgent need for eƯective waste disposal solutions.
This paper explores the impact of improper waste sorting, which contributes to landfill
overflow and contaminates recyclable materials, ultimately exacerbating greenhouse
gas emissions. A lack of public awareness and inconsistent waste management infrastructure
further complicate eƯorts to improve recycling rates. Data from various communities
indicate that inadequate education on waste sorting practices results in a high rate
of contamination in recycling streams, reducing the economic viability of recycling
programs. To address these issues, we propose the implementation of a comprehensive
waste management system that integrates standardized practices, educational outreach,
and accessible recycling infrastructure. Our findings suggest that empowering individuals
with knowledge and clear guidance on waste sorting can significantly enhance recycling
eƯiciency, reduce contamination, and promote environmental sustainability. The proposed
system aims to foster cleaner environments and contribute to a more sustainable future
by mitigating the adverse eƯects of waste on ecosystems and public health.
Sanger High School Projects
Cube Sat Solar Panel Deployer
Students: Michael Hernandez, Ying Liu, Selene Ruiz
Teacher: Shaun Cuaron
Summary: Cube Sats are small satellites that can be flown to the ISS and ejected from the
Space Station using the robotic arm. They are being made by small and large companies,
universities and even high schools. They can have a wide variety of uses and made
in a lot of sizes. Solar panels are often placed on the sides of the cube sats but
in this case, they would interfere with the cooling of the internal electronics. The
satellite will keep the same orientation as it orbits around the Earth which means
that the solar panels will not always be pointing at the sun. The goal is to get as
much power for the satellite as possible from the array since this satellite does
not self orient so the solar panels are only expected to be collecting light 30% of
the time.
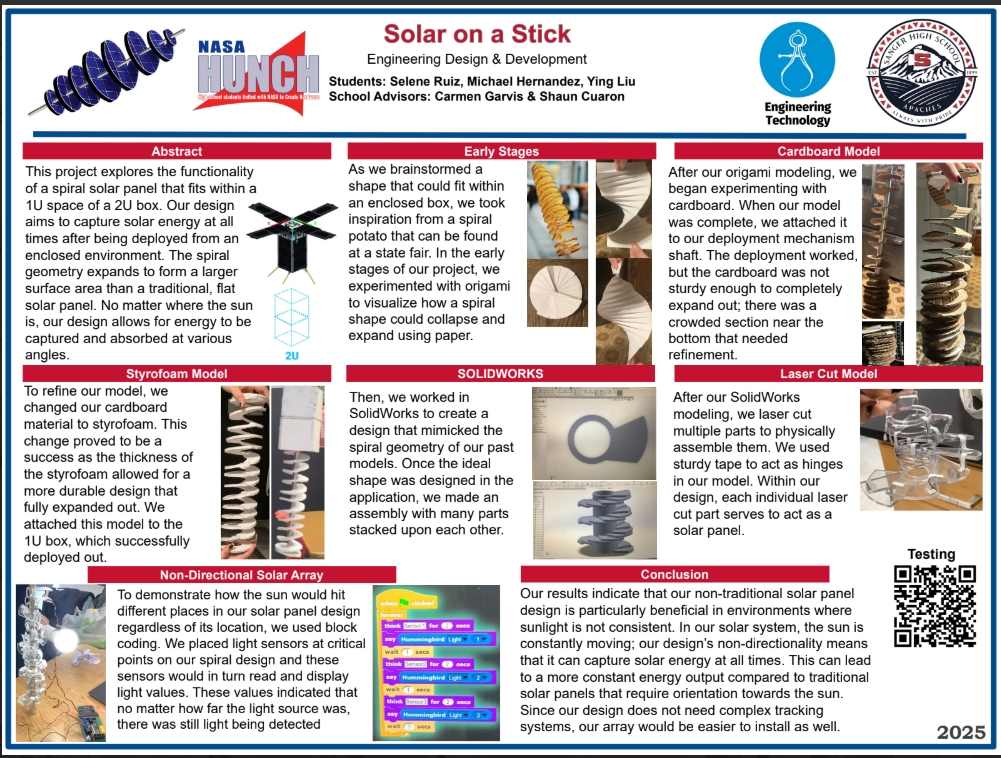{kind=link}
Ice from Luna Regolith
Students: Jasper Merry, Emmanuel Castro
Teacher: Shaun Cuaron
Summary: Design, build and test a demonstration for how loose ice crystals might be separated
from loose regolith using vibration.
• Use ABS (density of 1.0 g/cm3) shavings to simulate the lower density ice from the
higher density regolith (density of 1.5 g/cm3)
• Variable speed vibrator
• Off center mass on motor or Speaker style (check with your physics teacher)
• Cookie sheet and/or Lasagna pan (a place to start but your container design can
be any shape)
• We don’t expect your sample to be perfectly clean but increases the concentration
of the ice in the regolith significantly.
• Can be either a batch process or a continuous process.
• How clean of “ice” particles can you provide?
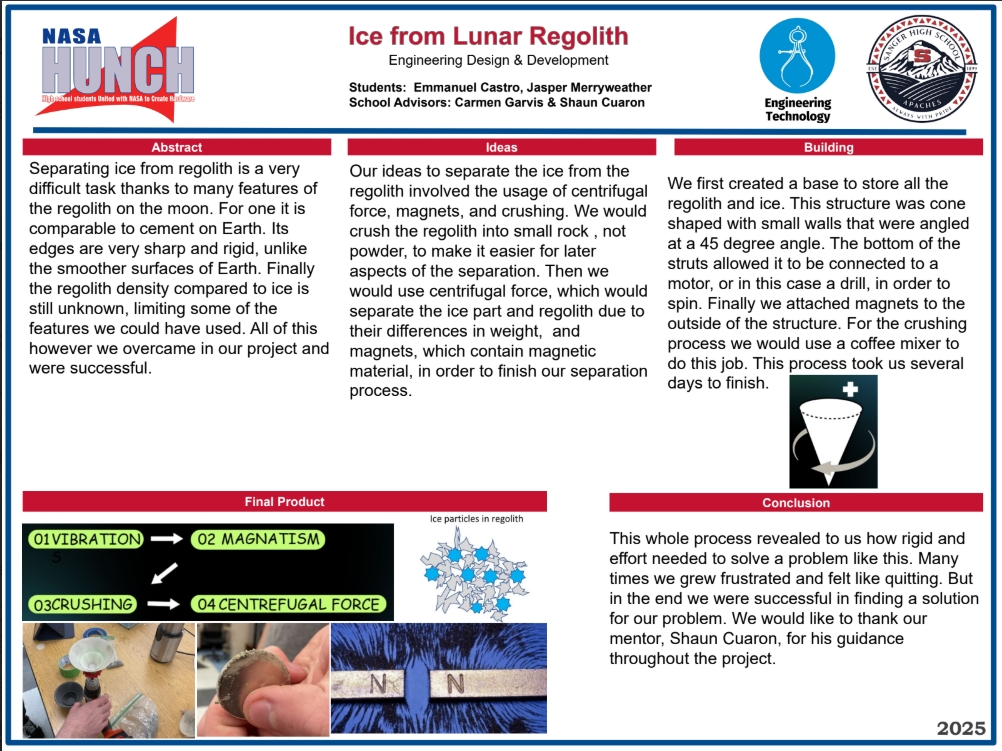{kind=link}
Lunar Ejecting Robot
Students: Jayden Tung, Sharman Ghotra, Sean Amaya, Ben Smith
Teacher: Shaun Cuaron
Summary: Design, build and test a small robot and the system that ejects a robot from the
lander and takes a picture:
• The robot needs to weigh no more than 15 oz.
• The robot can expand bigger than 4”wide x 6”deep x 5”tall after being ejected if
desired.
• The robot needs to be able to survive a 6 ft drop into dry sand
• The robot will take a picture of the surroundings—including the lander
• The storage container on the lander has internal dimensions of 4” wide x 6”deep
x 5” tall.
• The storage container needs to hold the robot in place during the flight from Earth
to the moon.
• The storage container must release the robot and eject your robot from the lander
between 24” and 36” from the lander.
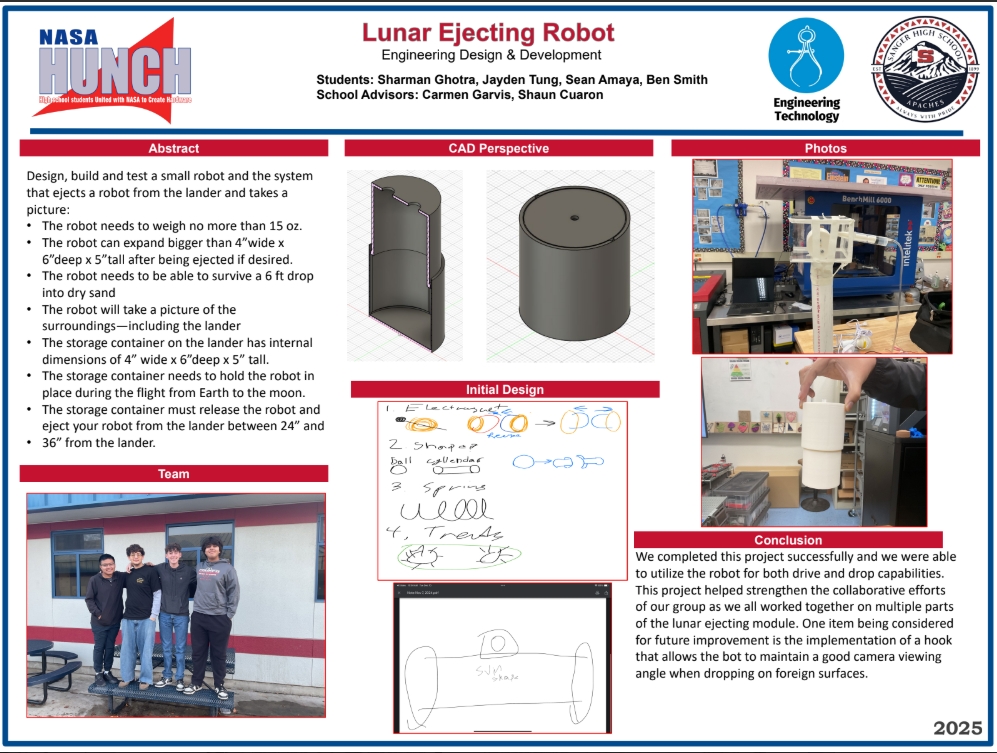{kind=link}
Sanger West High School Projects
Adjustable Socket
Students: Vincent Yang, Jesus Rumbo, & Oscar Sanchez
Teacher: Ramon Cuevas
Summary: This project focuses on the development of an adjustable prosthetic socket using Carbon
Fiber Nylon Filament, with a target cost of $100–$200. The goal is to create an affordable
and durable solution for amputees who may not have access to high-cost traditional
prosthetics. Carbon Fiber Nylon was selected for its exceptional durability, tensile
strength, and flexibility, all of which are critical for a reliable and comfortable
prosthetic socket. To ensure safety and functionality, the design will undergo professional
validation before moving forward. Additionally, market research is being conducted
to assess demand and identify potential applications, particularly in low-income regions,
where cost-effective prosthetics could significantly enhance mobility and overall
quality of life for amputees.
Filter Flow
Students: Logan Davis, Sydney Dowling, and Matthew Elisarraraz
Teacher: Ramon Cuevas
Summary: Irrigation systems can be faulty by clogging up due to the metals/dirt pumped from
canals. The survival of crops is important as most are used as resources for human
consumption, without the proper water received, the crops from developing to their
fullest extent which results in the consumer becoming malnourished.
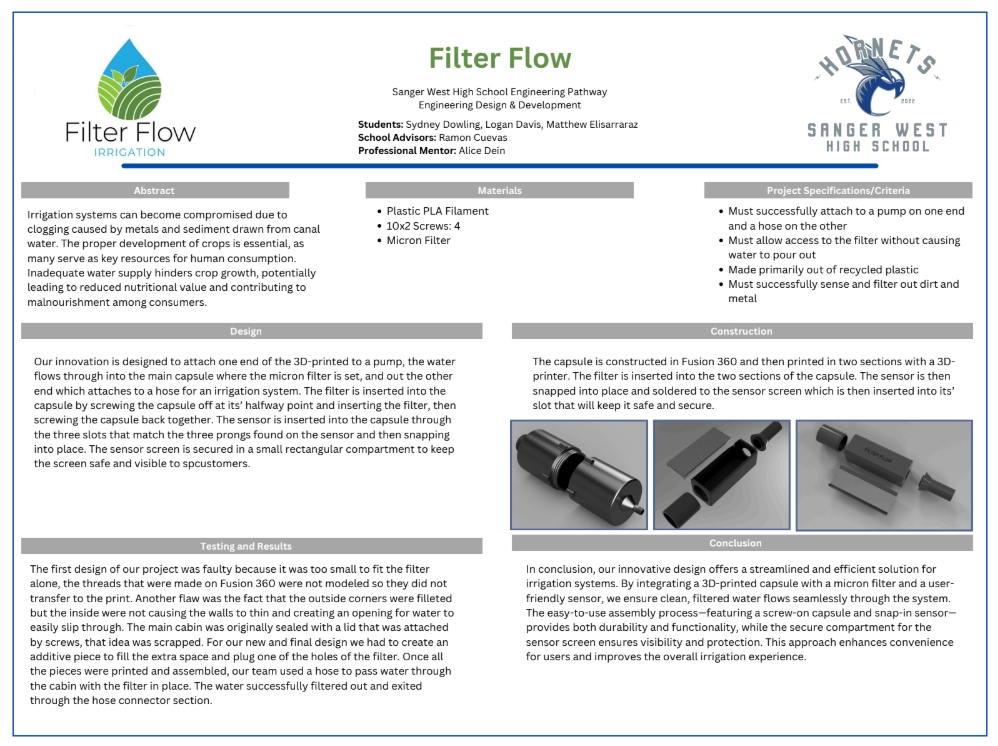{kind=link}
HyperView
Students: Justice Xiong, Kaden Calandra, Viktor Zamora
Teacher: Ramon Cuevas
Summary: Visually impaired people have trouble navigating the world. While a simple walking
stick can help them detect what is directly in front of them, there is a need for
greater situational awareness in crowded or packed areas, as well as the need to detect
objects/people from further distances. That is why we have aimed our project in the
direction of solving these issues. This project is geared towards making a product
that will seamlessly integrate into these people's daily lives, while simultaneously
improving the quality of those lives significantly. Our product will be a lightweight
camera with a clip connected to it. It can attach to a hat, detect stimuli, and relay
the information of what it’s seeing. This will be intended for the use of the visually
impaired in order to make their navigation of the crowded everyday world much easier
for them.
Landing Legs and Payload Release
Students: Sahid Cuevas, Ethan Irvin
Teacher: Ramon Cuevas
Summary: This project, developed by our team, Astra Tech Solutions, for the NASA HUNCH program,
focuses on the design, prototyping, and testing of a lunar landers landing leg system
and payload deliver mechanism. The objective is to ensure the lander can survive impact
on inclined lunar terrain and reliably deploy its payload and rover after touchdown.
The final prototype, “Scamper v6,” features modular shock-absorbing legs and a motorized
winch-based release system, allowing for repeatable and flexible testing. Through
physical drop tests and computer simulations, key design requirements such as stability,
durability, and gentle deployment were evaluated. Iterative improvements were made
based on test outcomes, with a focus on maintaining upright landings and secure payload
retention.
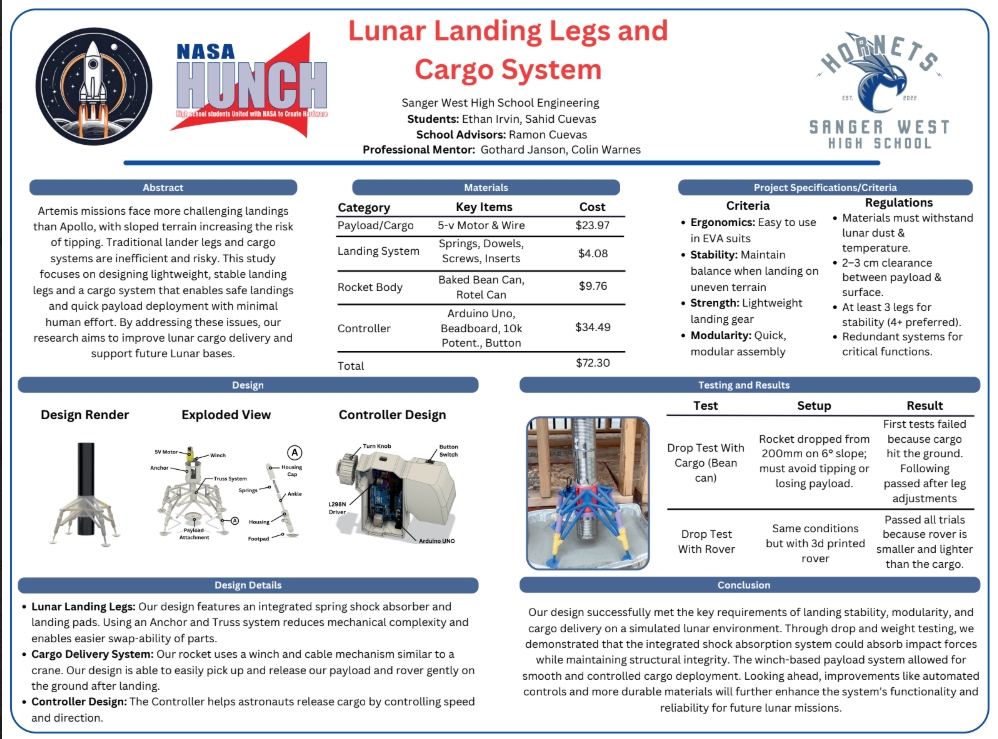{kind=link}
New Wheelchair Wheel
Students: Alex Cacconie, Marvyn Alcantara, Juan Morales
Teacher: Ramon Cuevas
Summary: Wheelchairs require a lot of strength and put a lot of strain on the users. Day to
day wheelchair use damages the hand of the user giving them calluses and blisters,
this is especially true for first time wheelchair users. Fatigue is also a big concern
when operating a wheelchair. Our goal with this project is to design a new wheel for
wheelchairs that makes it easier for the user to travel on a day to day basis. We
plan on achieving this by integrating planetary gears into the wheels of the wheelchair
and using gear ratios that will allow us to control the amount of user force required
to push the wheelchair. We also plan to add an ergonomic rim in the design. Manual
wheelchair users are bound to experience upper body injury and pain. Estimates say
that 70 to 100% of individuals will experience extremity pain using their wheelchair
at some point in their lives. Fingers and shoulders tend to be the most common injuries
due to a lack of flexibility and/or strength in the shoulder joint. A wheel that takes
less physical strength from the user, especially those who are older and already suffer
from weak joints or muscles would benefit from this invention.
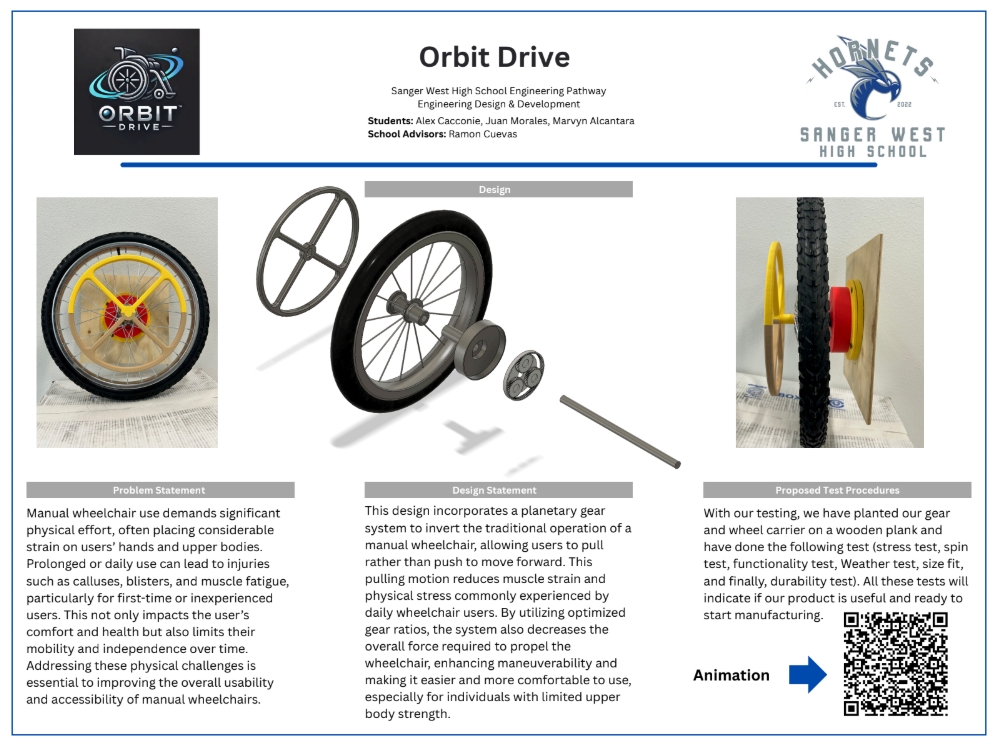{kind=link}
PESTI-LIGHT
Students: Ibraheam Alshoaibi, Landon Hernandez, Josiah Hernandez
Teacher: Ramon Cuevas
Summary: The goal of this project is to provide effective solutions for individuals facing
pest-related challenges, making pest management more efficient, sustainable, and user-friendly.
By developing innovative methods for pest control, the project aims to reduce the
reliance on harmful chemicals and frequent purchases of pesticides. Through the introduction
of alternative approaches, individuals can better manage pest issues while promoting
healthier living environments. This project focuses on improving the effectiveness
of pest control strategies, ensuring safety for residents, and reducing environmental
impacts. Ultimately, the project seeks to empower individuals to handle pest issues
more sustainably, improving overall well-being while reducing costs and potential
health risks. By creating practical, long-term solutions, this initiative supports
a more sustainable approach to pest management and contributes to a cleaner, safer
living space for affected individuals.
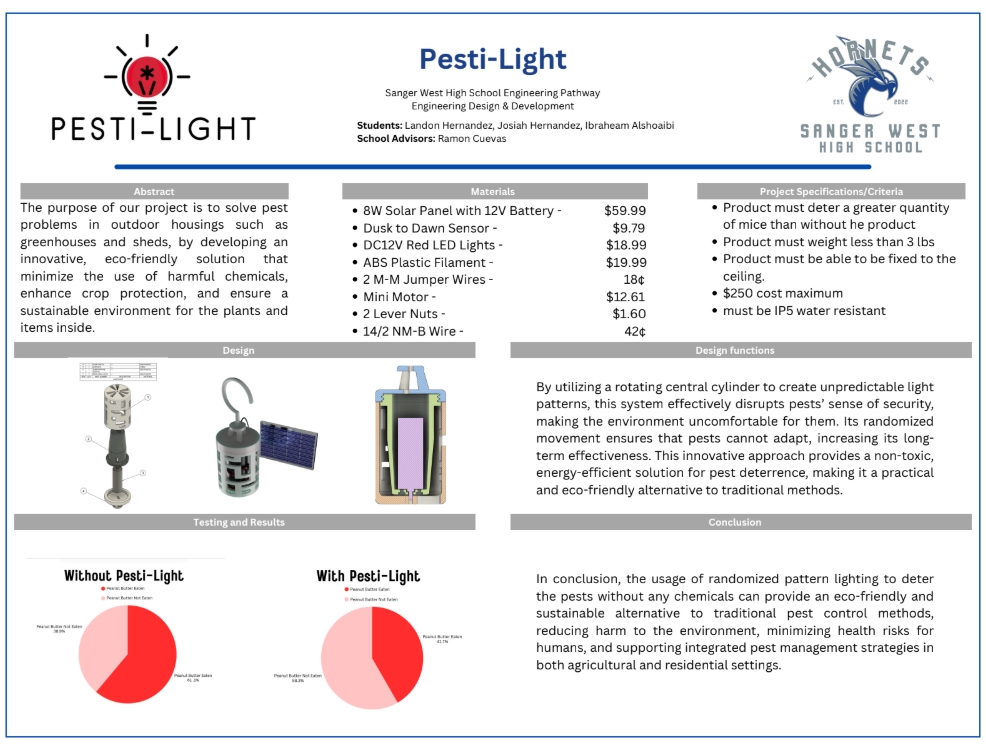{kind=link}
Project SPEARS (Swift, Precise, Ejection Actuating Reciprocation System)
Students: Daniel Simmons, Isaac Pulido, Gabriel Mejia
Teacher: Ramon Cuevas
Summary: Project S.P.E.A.R.S. (Swift, Precise, Ejection, Additive, Reciprocation System)
is proposed to improve 3D printing speed and accuracy. 3D printers are increasingly
in demand by industrial and consumer markets alike. As demand increases, more and
more will be demanded of commercial 3D printers, and 3D printers will be expected
to be more and more precise and fast. Here we discuss the design and validation processes
undertaken to solve this new demand for quicker and more accurate 3D printers. The
data of this problem will also be addressed to visualize how the data is subject to
change based on our solution.
{kind=link}
Smooth Streets
Students: Jose Manzano, Dylan Valdovinos, Ayden Mata
Teacher: Ramon Cuevas
Summary: Our project aims to improve pedestrian safety at intersections by designing a toll
booth-style device that controls vehicle and pedestrian movement. The system includes
automated barrier arms, LED lights, and motion sensors to ensure clear communication
and orderly traffic flow. When it’s a vehicle’s turn to move, the arm will rise, while
pedestrians are signaled to cross safely.
Valley Fever Self-Diagnostic Project
Students: Katelyn Harbert, Isaiah Perez, Michael Nelson
Teacher: Ramon cuevas
Summary: Modern medical equipment, such as the centrifuge, is essential in identifying many
viruses, diseases, and parasites, including Valley Fever. However, industry-standard
equipment is expensive, and many require extensive infrastructure to operate. The
majority of people suffering from ailments like Valley Fever come from economically
depressed rural areas without access to this equipment. Valley Fever is a fungal infection
that usually causes flu-like symptoms. It is especially common in the Central Valley.
It can last for months and cause more severe symptoms, such as weight loss, chest
pain, skin lesions, lesions in the skeletal system, and swollen joints. Valley Fever
has been on the rise in California, reaching a record high of reported cases in 2023.
As such, we want to develop a proof of concept for a Valley Fever Self Diagnostic.
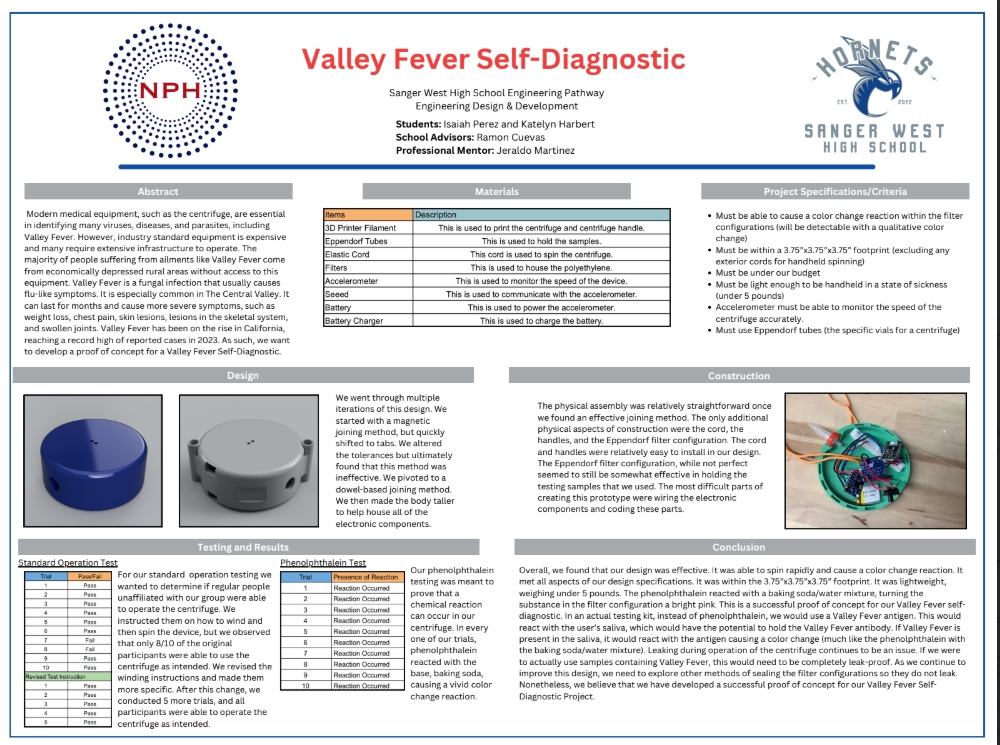{kind=link}